






В этой статье описывается, как программы RFEM и RSTAB автоматически устанавливают положение стержня и при необходимости его можно отрегулировать с помощью углов поворота стержня.
Оси локальных стержней
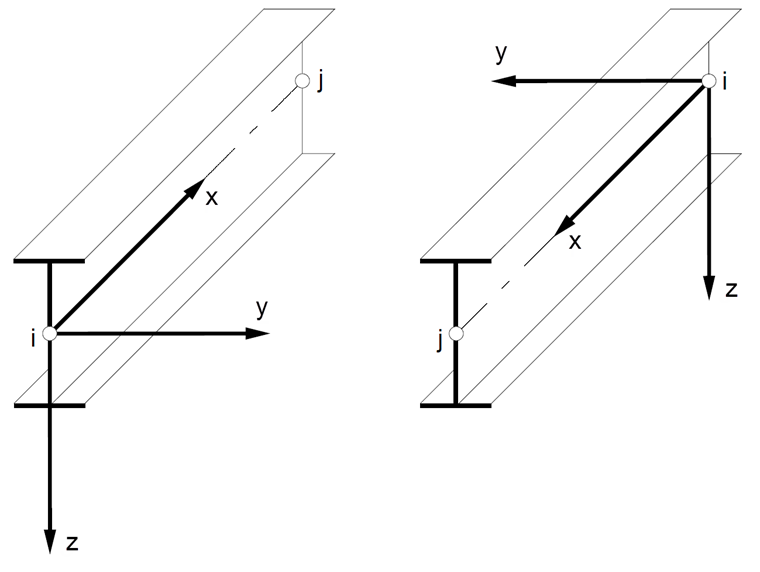
Связанная со стержнем система координат с осями x, y и z определяется как прямоугольная с правыми винтами. Локальная ось стержня x всегда представляет собой центральную ось стержня. Он соединяет начальный узел с конечным узлом, в то время как положительное направление оси x ориентировано от начального узла i к конечному узлу j стержня. В случае симметричных сечений местные оси y и z представляют собой главные оси стержня (эти оси обозначаются как u и v в случае асимметричных сечений). Ось y - это «большая» ось сечения.
Угол поворота стержня β
Если стержень вращается вокруг своей продольной оси, это вращение можно определить с помощью угла β. Положение и, следовательно, локальная система координат стержня xyz четко описываются путем задания начального узла i и конечного узла j, а также угла поворота β.
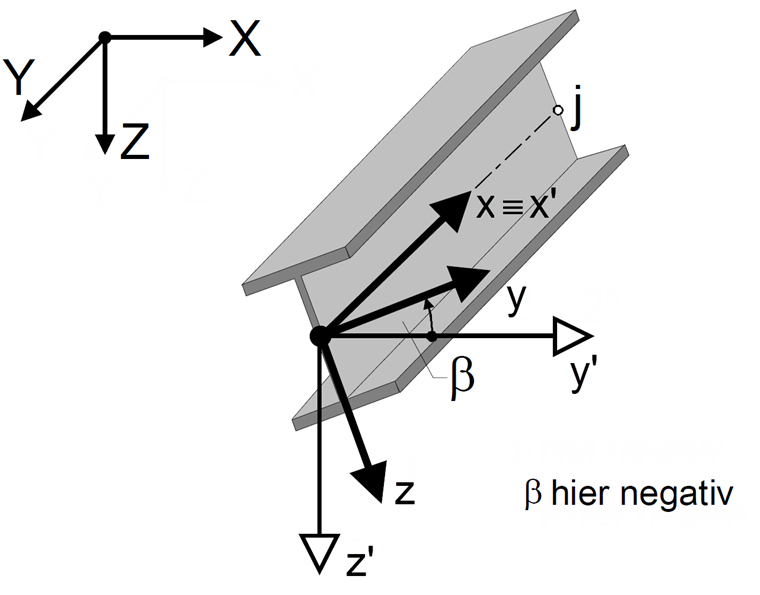
Затем программа автоматически определяет положение локальных осей y и z: Ось z расположена в пространстве таким образом, что Z ‑ часть стрелки направления, относящейся к глобальной системе координат, всегда указывает на положительное глобальное направление Z. Затем ось y получается по правилу правой руки. Из этого положения стержень можно повернуть, используя угол поворота β, который указывает поворот локальной системы x, y, z относительно системы отсчета x ', y ', z '. В случае настройки по умолчанию β = 0 °, система отсчета одновременно является местной системой. В случае положительного угла β направления y и z вращаются вокруг оси продольного стержня (местной оси x), как и в случае правого винта.
Если локальная система xyz повернута вправо на 90 °, ось y находится в положении оси z перед поворотом.
На рисунке 02 показано левостороннее вращение. В этом случае угол β следует ввести как отрицательный.
Ориентация стержня в случае негоризонтального положения стержня
Если стержень находится в горизонтальном положении, ориентация и поворот ясны, как показано на рисунке 02. Однако, если элемент расположен в пространстве, программа ориентирует элемент в соответствии со следующими правилами.
Для угла поворота стержня β = 0 ° возможны два случая.
1-й Дело: Общее положение стержня, β = 0 °
Базовая ось y ' параллельна глобальной плоскости XY. Базовая ось z 'перпендикулярна осям x' и y ', в то время как ее Z ‑ компонента всегда указывает в направлении глобальной оси Z. Если ось Z определена вниз в общих данных, она указывает в направлении положительной компоненты Z; если ось Z направлена вверх, она указывает в направлении отрицательной Z-компоненты. Направления осей подчиняются правилу правой руки.
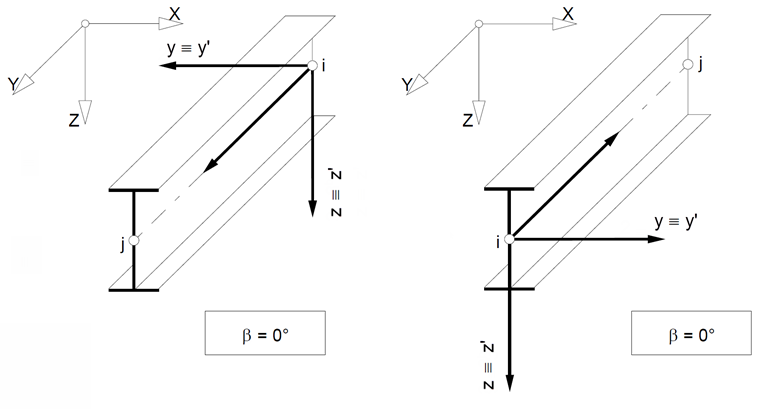
Второй Дело: Вертикальное положение стержня, β = 0 °
Базовая ось y ' указывает в направлении глобальной оси Y. Ось z получается с помощью правила правой руки; если β = 0 °, он указывает в направлении глобальной оси X.
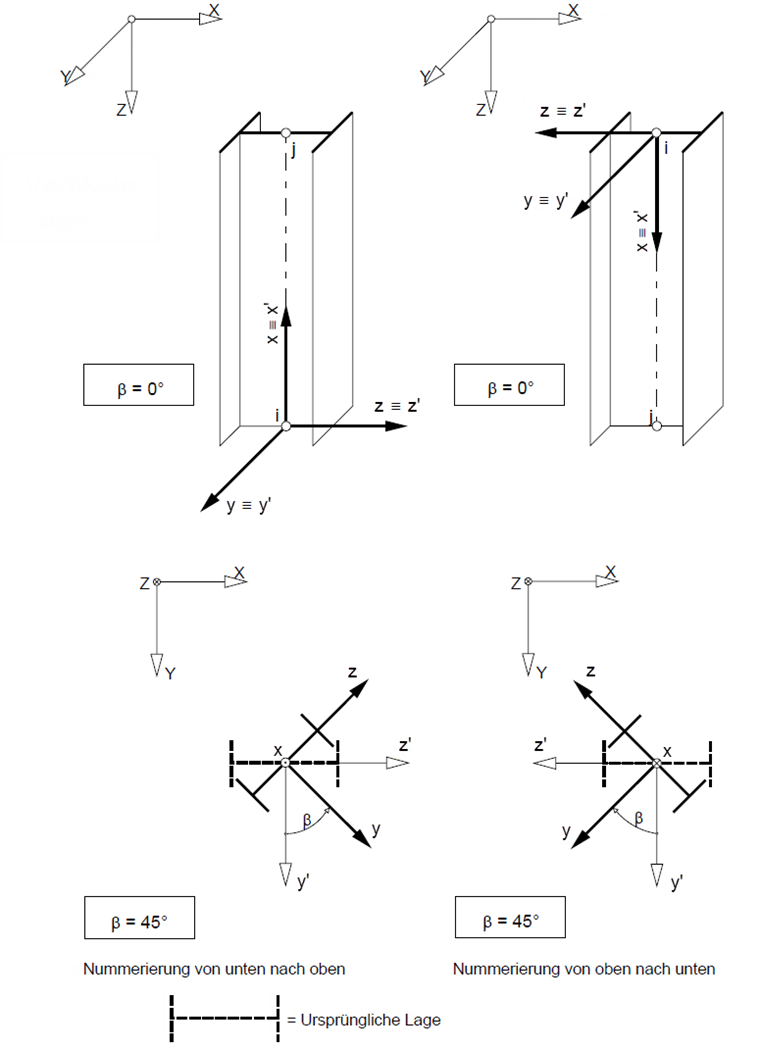
Для угла поворота стержня ± 90 ° и 180 ° программа применяет следующие допущения для стержней в вертикальном положении:

Стержень можно повернуть вокруг продольной оси этого стержня, используя угол поворота β. Положительный угол соответствует повороту оси y в направлении оси z. Для ориентации оси важно, определяется ли стержень сверху вниз или снизу вверх (см. Рисунок 04 и рисунок 05).
Изменение оси стержня из-за положения стержня
Если ось «прыгает» в случае несущего неразрезного стержня, причиной обычно является автоматическая классификация положения стержня: Положение неразрезного стержня классифицируется как «вертикальное», а положение соединенных стержней - как «общее». Общее положение стержня применяется, если есть (минимально) разные координаты X и Y для узлов определения стержня, поэтому стержень слегка наклонен.
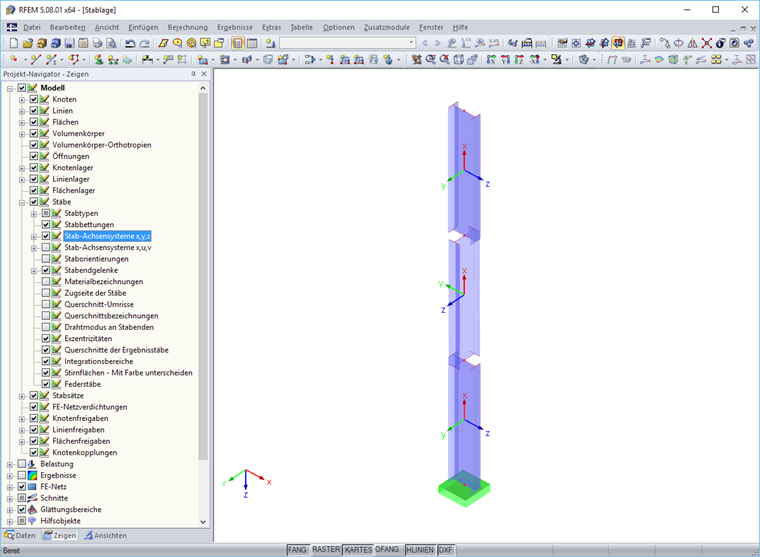
Переменные оси усложняют определение местных нагрузок на стержни и несовершенств. Они также влияют на символы и знаки внутренних сил.
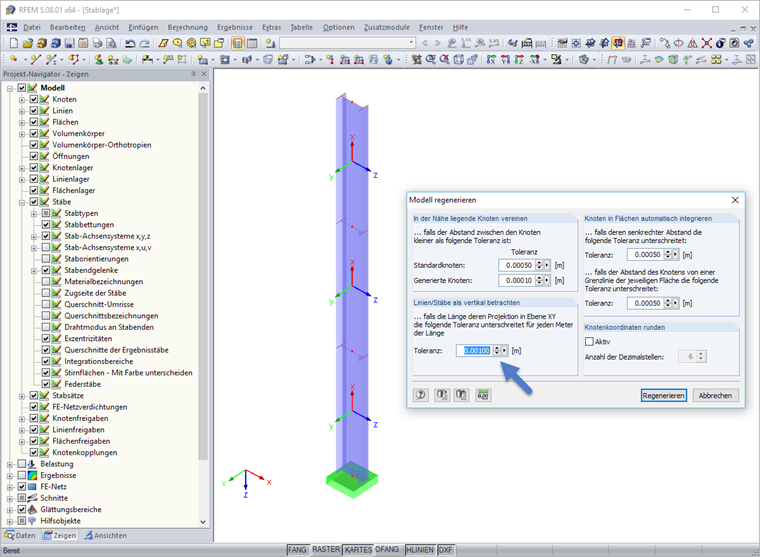
В частности, при импорте модели DXF может случиться так, что координаты X и Y узлов определения не будут идентичны всем десятичным разрядам. Это можно исправить вручную. Лучше всего компенсировать отклонения с помощью опции программы «Восстановить модель», которая также позволяет задавать допуски, задаваемые пользователем.
Заключение
В 3D-модели ориентация стержня важна для жесткости модели, а также для задания местных нагрузок. При вводе стержня система местных осей автоматически определяется на основе узлов определения. Затем можно настроить ориентацию оси с помощью угла поворота стержня. RFEM и RSTAB позволяют быстро и надежно проверить положение стержня в 3D-рендеринге.