






V našem příspěvku popíšeme, jak se poloha prutu stanoví v programu RFEM a RSTAB automaticky a jak ji lze v případě potřeby upravit zadáním úhlu natočení prutu.
Lokální osy prutu
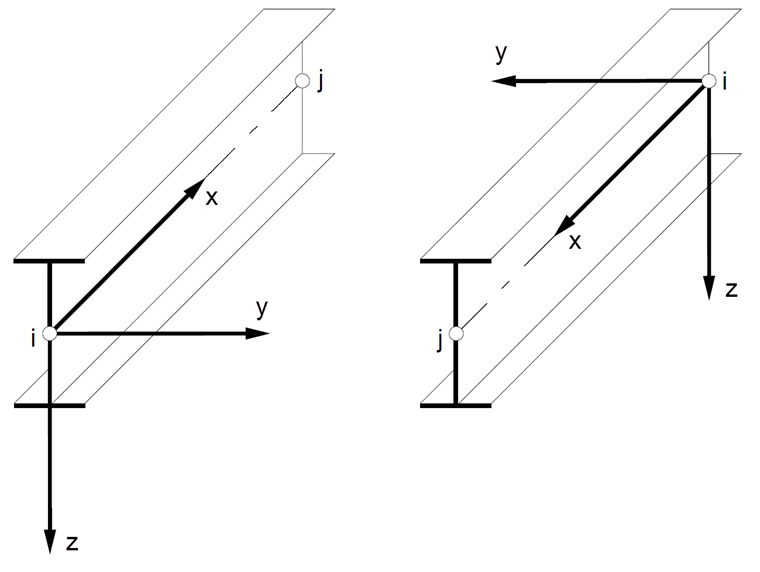
Souřadný systém prutu s osami x, y a z je pravoúhlý a pravotočivý. Lokální osa x prutu se vždy shoduje s těžišťovou osou prutu a spojuje počáteční uzel s koncovým uzlem. Kladný směr osy x je přitom dán od počátečního uzlu i ke koncovému uzlu j prutu. U symetrických průřezů představují lokální osy y a z hlavní osy prutu (u nesymetrických průřezů se tyto osy označují jako u a v). Osa y je přitom osa průřezu s větší tuhostí.
Úhel natočení prutu β
Pokud je prut pootočen okolo své podélné osy, můžeme zadat pro toto natočení příslušný úhel β. Počátečním uzlem i a koncovým uzlem j a dále stanoveným úhlem natočení β je jednoznačně popsána poloha, a tím i lokální souřadný systém prutu xyz.
Polohu lokálních os y a z stanoví program nejdříve automaticky: Osa z leží v prostoru tak, aby složka Z směrové šipky ve vztahu ke globálnímu souřadnému systému vždy vedla v kladném globálním směru Z. Osa y se pak řídí pravidlem pravé ruky. Z dané polohy lze prut natočit o úhel β, který udává pootočení lokálního systému x, y, z vůči vztažnému systému x', y', z'. Při standardním nastavení β = 0° odpovídá vztažný systém lokálnímu systému. V případě kladného úhlu β se směry y a z natočí jako u pravotočivého šroubu okolo podélné osy prutu (lokální osy x).
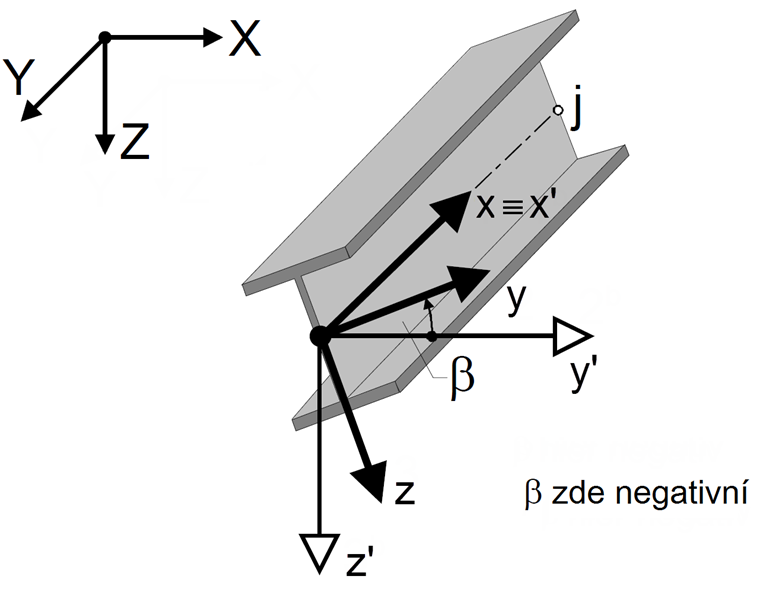
Jestliže se lokální systém xyz natočí pravotočivě o 90°, bude se osa y nacházet ve stejné poloze jako osa z před natočením.
Na obr. 02 je znázorněno levotočivé pootočení. V takovém případě je třeba zadat záporný úhel β.
Orientace prutu v případě, že prut není ve vodorovné poloze
Jestliže se prut nachází ve vodorovné poloze, pak jsou jeho orientace i natočení podle obr. 02 jednoznačné. Pokud ovšem prut leží v prostoru, bude se program při určení jeho polohy řídit následujícími pravidly.
V případě úhlu natočení prutu β = 0° jsou možné dva případy.
1. případ: Obecná poloha prutu, β = 0°
Vztažná osa y' je rovnoběžná s globální rovinou XY. Vztažná osa z' je kolmá na osy x' a y', přičemž její složka Z ukazuje vždy ve směru globální osy Z. Pokud směřuje osa Z dolů v souladu s naším zadáním v dialogu Základní údaje, pak ukazuje ve směru kladné složky Z. Jestliže osa Z směřuje nahoru, ukazuje ve směru záporné složky Z. Směry os se řídí pravidlem pravé ruky.
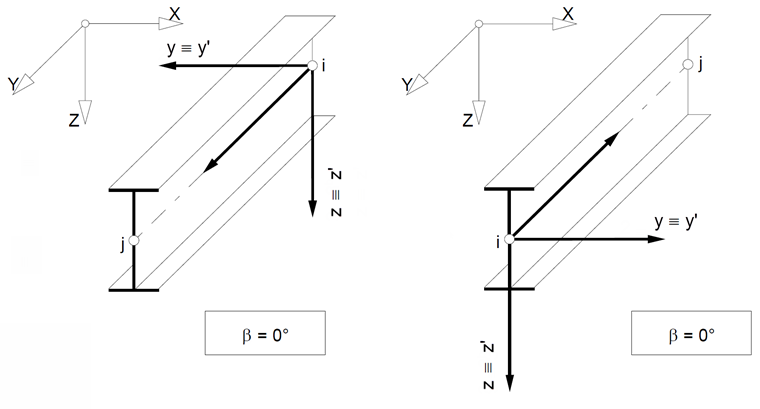
2. případ: Svislá poloha prutu, β = 0°
Vztažná osa y' ukazuje ve směru globální osy Y. Osa z je dána pravidlem pravé ruky; v případě β = 0° vede ve směru globální osy X.
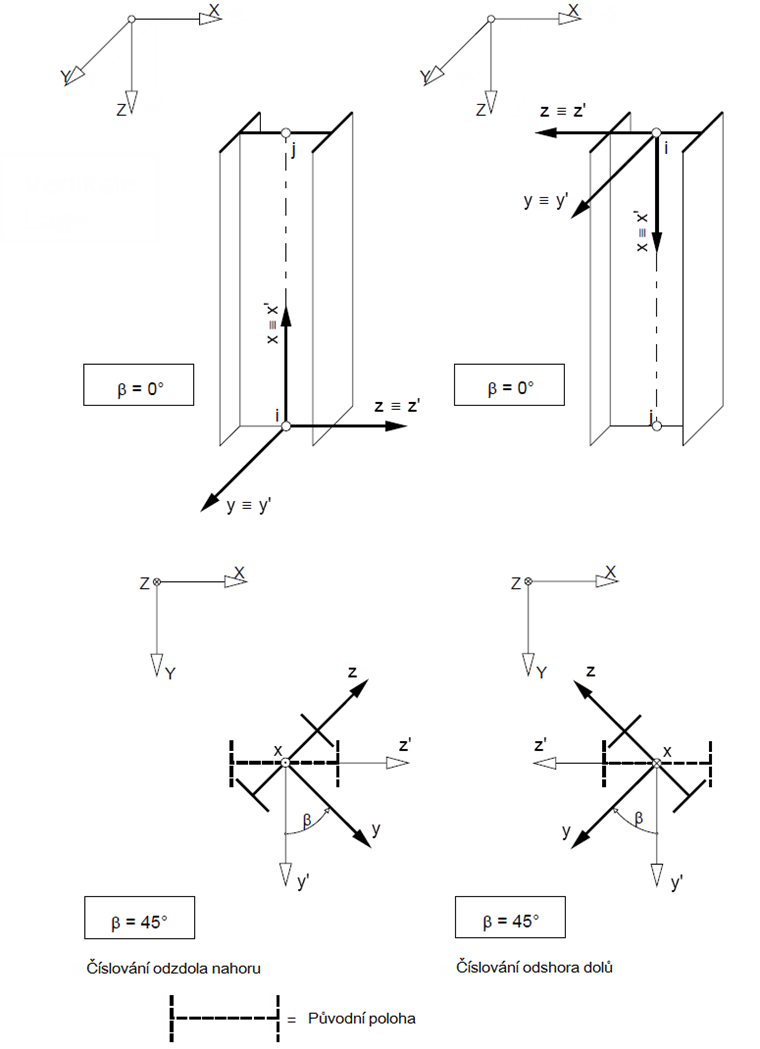
Pokud je úhel natočení prutu ±90° a 180°, postupuje program v případě prutů ve svislé poloze následovně:
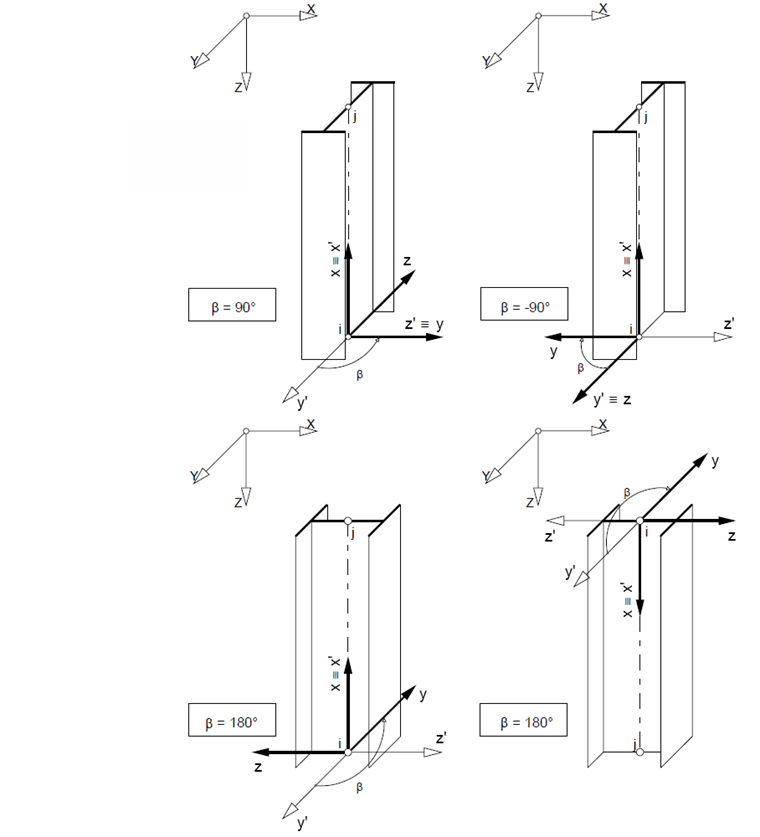
Prut lze natočit o úhel β okolo jeho podélné osy. Kladný úhel odpovídá pootočení osy y ve směru osy z. Pro orientaci os je důležité, zda je prut zadán shora dolů nebo opačně (viz obr. 04 a 05).
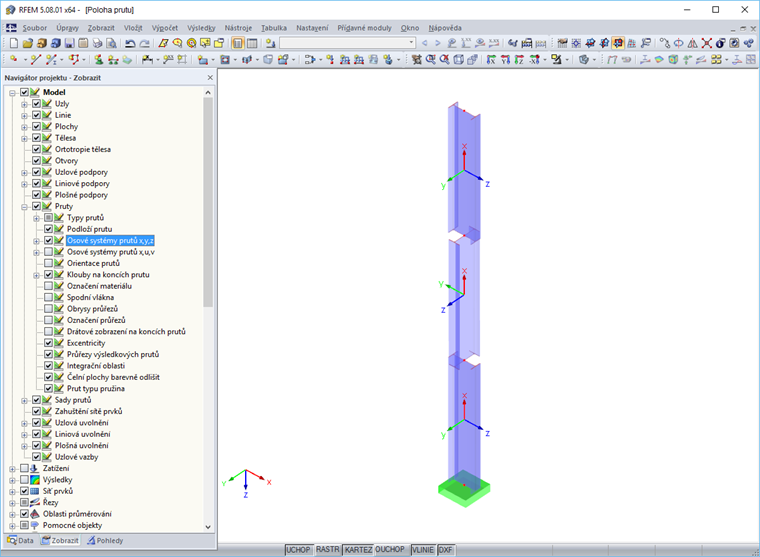
Změna os prutu v důsledku polohy prutu
Pokud se u průběžného sledu prutů ve sloupu osy „stočí“, je obvykle důvodem automatická klasifikace polohy prutu: Poloha jednoho prutu ve sloupu je vyhodnocena jako „svislá“, zatímco poloha navazujícího prutu jako „obecná“. Obecná poloha prutu se uvažuje v případě (minimálních) odchylek souřadnic X a Y u definičního uzlu prutu, čili pokud je prut lehce nakloněn.
Změna os ztěžuje zadání lokálních zatížení na pruty a imperfekcí. Ovlivňuje také označení a znaménka vnitřních sil.
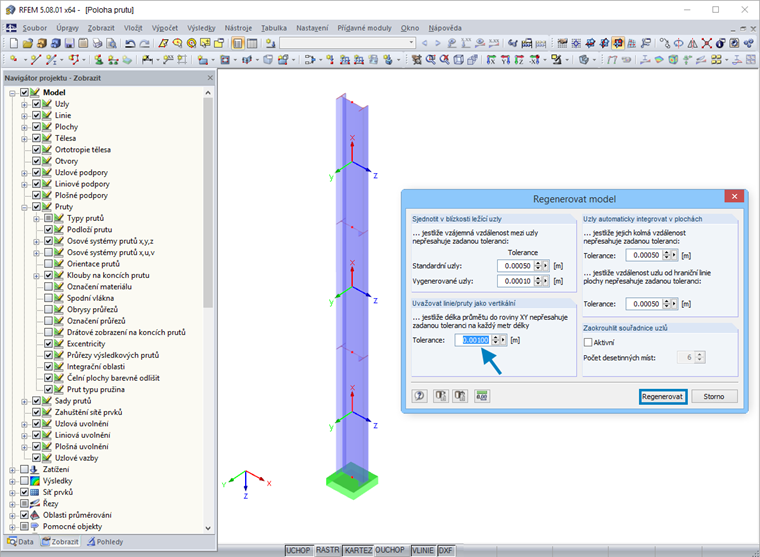
Zvláště při importu modelu DXF se může stát, že souřadnice X a Y definičních uzlů se neshodují ve všech desetinných číslech. Nápravu můžeme provést ručně. Elegantnější řešení představuje vyrovnání odchylek pomocí volby „Regenerovat model“ v programu, která také uživateli umožňuje zadat požadovanou toleranci.
Závěr
Ve 3D modelu je orientace prutů důležitá pro tuhost modelu a pro přiřazení lokálních zatížení. Při zadání nového prutu se lokální osový systém určí nejdříve automaticky na základě definičních uzlů. Orientaci os lze poté individuálně upravit zadáním úhlu natočení prutu. V programu RFEM i RSTAB můžeme polohu prutu rychle a spolehlivě ověřit ve 3D renderování.