






Este artículo describe cómo RFEM y RSTAB establecen la posición de la barra automáticamente y cómo se puede ajustar utilizando ángulos de rotación de la barra, si es necesario.
Ejes de miembros locales
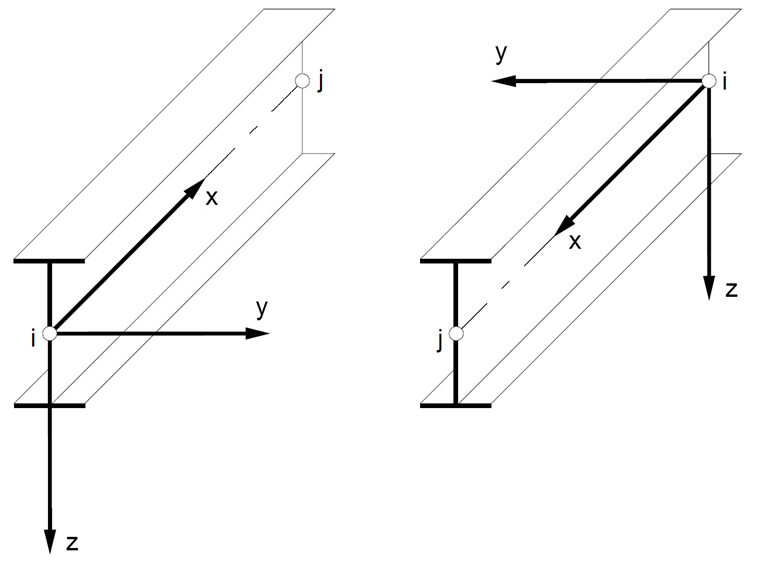
El sistema de coordenadas relacionado con la barra con los ejes x, y y z se define como en ángulo recto con tornillos a la derecha. El eje local x de la barra siempre representa el eje del centro de gravedad de la barra. Conecta el nodo inicial con el nodo final mientras que la dirección positiva del eje x está orientada desde el nodo inicial i hasta el nodo final j de la barra. En el caso de secciones simétricas, los ejes locales yyz representan los ejes principales de la barra (estos ejes se indican como uyv en el caso de secciones asimétricas). El eje y es el eje "mayor" de la sección transversal.
Ángulo de giro de la barra β
Si una barra tiene un giro alrededor de su eje longitudinal, este se puede definir por el ángulo β. La posición y, por lo tanto, el sistema de coordenadas de la barra local xyz se describe claramente especificando el nodo inicial i y el nodo final j, así como el ángulo de rotación β.
A continuación, el programa define la posición de los ejes locales yyz automáticamente: El eje z está ubicado en el espacio de manera que la parte Z de la flecha direccional relacionada con el sistema de coordenadas global siempre apunta a la dirección global positiva Z. A continuación, se obtiene el eje y según la regla de la derecha. Desde esta posición, la barra se puede rotar usando el ángulo de rotación β, que indica la rotación del sistema local x, y, z contra el sistema de referencia x ', y ', z '. En el caso de la configuración predeterminada β = 0 °, el sistema de referencia es el sistema local al mismo tiempo. En el caso del ángulo positivo β, las direcciones yyz giran alrededor del eje de la barra longitudinal (eje local x) como en el caso de un tornillo a la derecha.
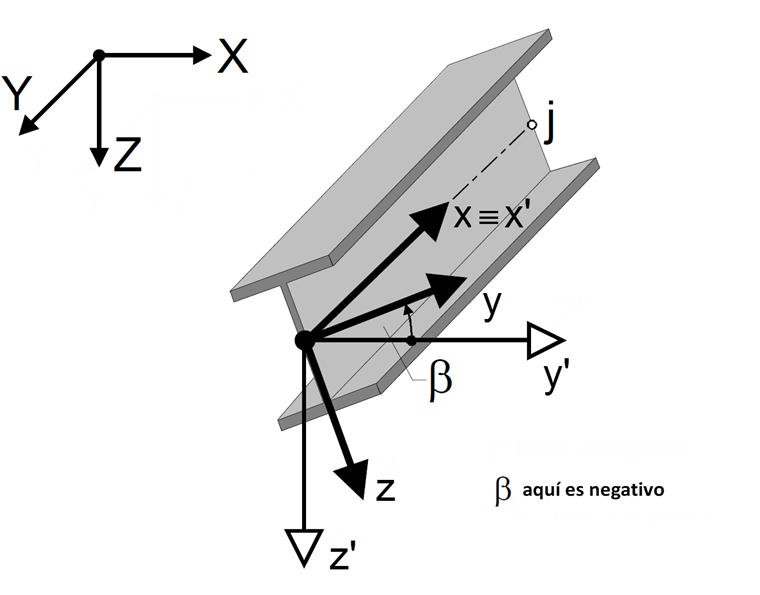
Si el sistema local xyz se gira a la derecha en 90 °, el eje y está en la posición del eje z antes de la rotación.
La figura 02 muestra la rotación atornillada a la izquierda. En este caso, el ángulo β debe introducirse como negativo.
Orientación de la barra en caso de una posición de barra no horizontal
Si la barra está en posición horizontal, la orientación y la rotación son claras, como se muestra en la Figura 02. Sin embargo, si el miembro está ubicado en el espacio, el programa orienta al miembro de acuerdo con las siguientes reglas.
Para un ángulo de rotación de la barra β = 0 °, son posibles dos casos.
1ª Caso 2: Posición general de la barra, β = 0 °
El eje de referencia y ' es paralelo al plano XY global. El eje de referencia z 'es perpendicular a los ejes x' y y ' mientras que su componente Z siempre apunta en la dirección del eje global Z. Si el eje Z se define hacia abajo en Datos generales, apunta en la dirección del componente Z positivo; si el eje Z se define hacia arriba, apunta en la dirección del componente Z negativo. Las direcciones de los ejes siguen la regla de la mano derecha.
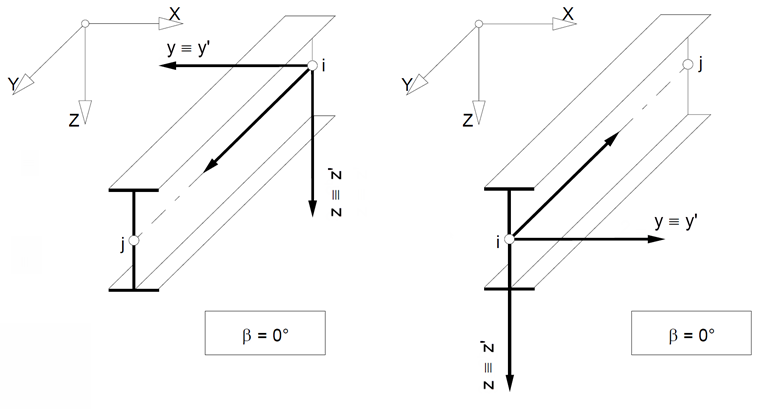
Segundo Caso 2: Posición vertical de la barra, β = 0 °
El eje de referencia y ' apunta en la dirección del eje Y global. El eje z se obtiene utilizando la regla de la derecha; si β = 0 °, apunta en la dirección del eje X global.
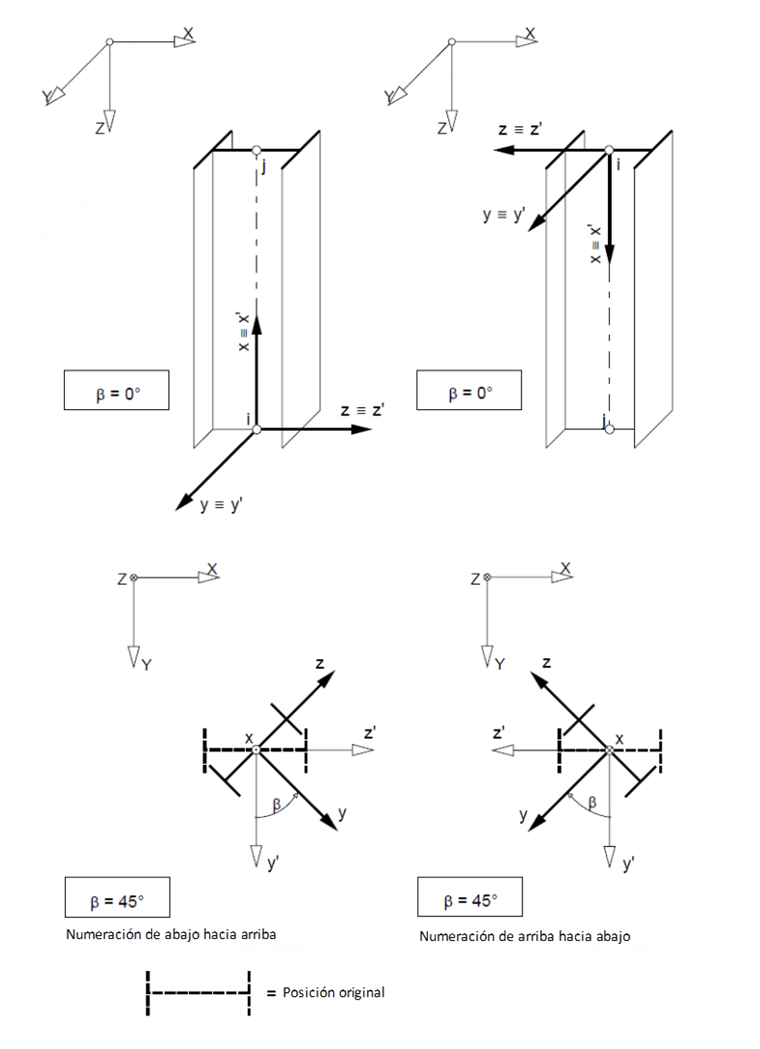
Para un ángulo de rotación de la barra de ± 90 ° y 180 °, el programa aplica los siguientes supuestos para barras en la posición vertical:
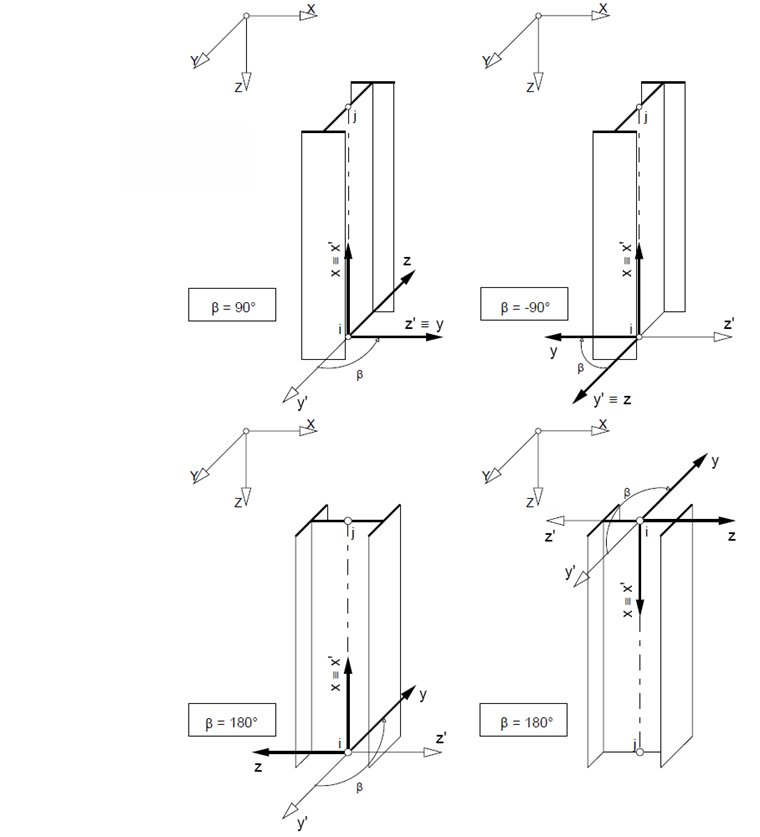
El miembro se puede girar alrededor del eje longitudinal de este miembro utilizando el ángulo de rotación β. Un ángulo positivo corresponde a una rotación del eje y en la dirección del eje z. Es importante para la orientación del eje si la barra está definida de arriba hacia abajo o de abajo hacia arriba (ver Figura 04 y Figura 05).
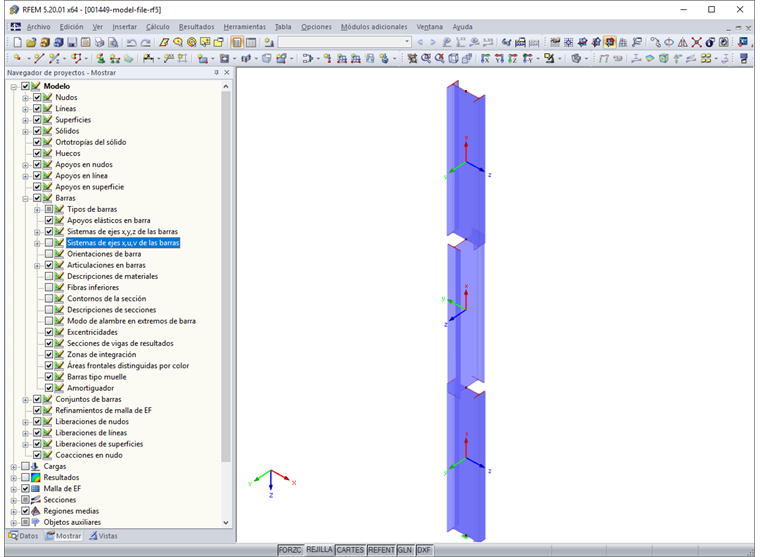
Modificación del eje de la barra debido a la posición de la barra
Si el eje "salta" en el caso de una barra continua de apoyo, la causa suele ser la clasificación automática de la posición de la barra: La posición de la barra continua se clasifica como "vertical" y la posición de las barras conectadas como "general". La posición general de la barra se aplica si hay (mínimamente) diferentes coordenadas X e Y para los nodos de definición de una barra, por lo que la barra está ligeramente inclinada.
Los ejes variables complican la definición de las cargas e imperfecciones de las barras locales. También influyen en los símbolos y signos de las fuerzas internas.
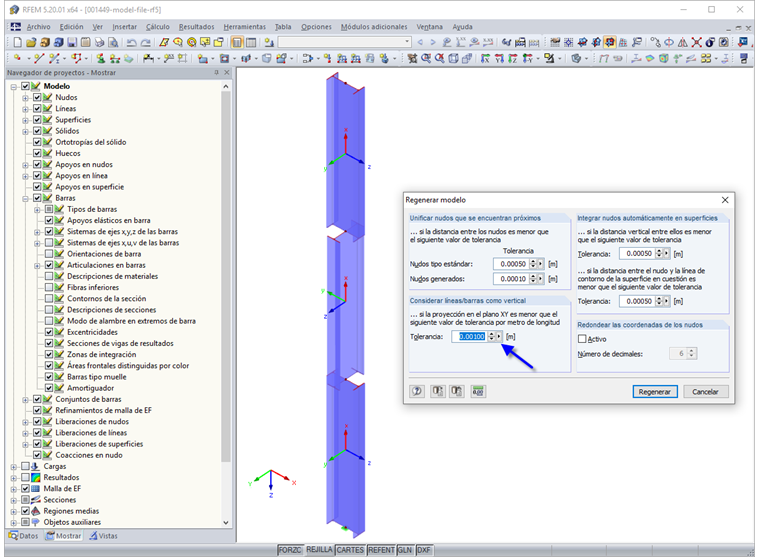
Al importar un modelo DXF en particular, puede suceder que las coordenadas X e Y de los nodos de definición no sean idénticas a todas las posiciones decimales. Esto se puede corregir mediante un ajuste manual. Una mejor forma es compensar las desviaciones con la opción de programa "Regenerar modelo", que también permite tolerancias definidas por el usuario.
Resumen
En un modelo 3D, la orientación de la barra es importante para la rigidez del modelo, así como para la asignación de cargas locales. Al introducir una barra, el sistema de ejes local se define automáticamente sobre la base de los nodos de definición. Entonces es posible ajustar la orientación del eje utilizando un ángulo de rotación de la barra. RFEM y RSTAB le permiten comprobar la posición de la barra de forma rápida y fiable en el renderizado 3D.