






W tym artykule opisano, w jaki sposób programy RFEM i RSTAB automatycznie ustawiają położenie pręta i w razie potrzeby można go skorygować za pomocą kątów obrotu pręta.
Lokalne osie prętów
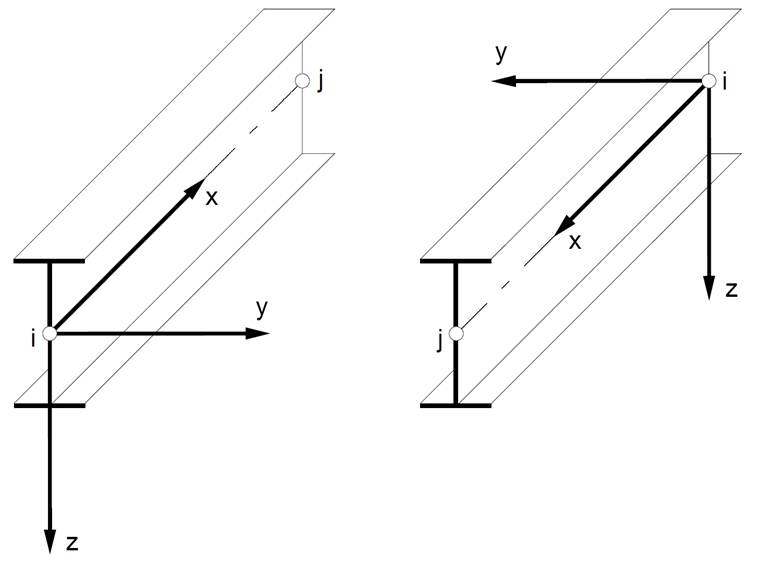
Układ współrzędnych dotyczący pręta o osiach x, y i z jest zdefiniowany jako prostokątny ze śrubami prawoskrętnymi. Lokalna oś x pręta zawsze reprezentuje oś środka ciężkości pręta. Łączy węzeł początkowy z węzłem końcowym, podczas gdy kierunek dodatni osi x jest zorientowany od węzła początkowego i do węzła końcowego j pręta. W przypadku przekrojów symetrycznych lokalne osie y i z reprezentują osie główne pręta (w przypadku przekrojów asymetrycznych osie te są oznaczone jako uiv). Oś y jest „większą” osią przekroju.
Kąt obrotu pręta β
Jeżeli pręt ma obrót wokół swojej osi podłużnej, obrót ten może być zdefiniowany przez kąt β. Położenie, a tym samym lokalny układ współrzędnych pręta xyz, są jasno opisane poprzez określenie węzła początkowego i i końcowego j oraz kąta obrotu β.
Następnie program automatycznie definiuje położenie lokalnych osi y i z: Oś z jest umieszczona w przestrzeni w taki sposób, że część Z strzałki kierunkowej odnosząca się do globalnego układu współrzędnych zawsze wskazuje dodatni globalny kierunek Z. Oś y jest następnie wyznaczana zgodnie z regułą prawej ręki. Z tego położenia pręt może zostać obrócony o kąt obrotu β, który wskazuje obrót układu lokalnego x, y, z względem układu odniesienia x', y', z'. W przypadku ustawienia domyślnego β = 0° układem odniesienia jest jednocześnie układ lokalny. W przypadku kąta dodatniego β kierunki yiz obracają się wokół osi podłużnicy (lokalna oś x), podobnie jak w przypadku śruby prawoskrętnej.
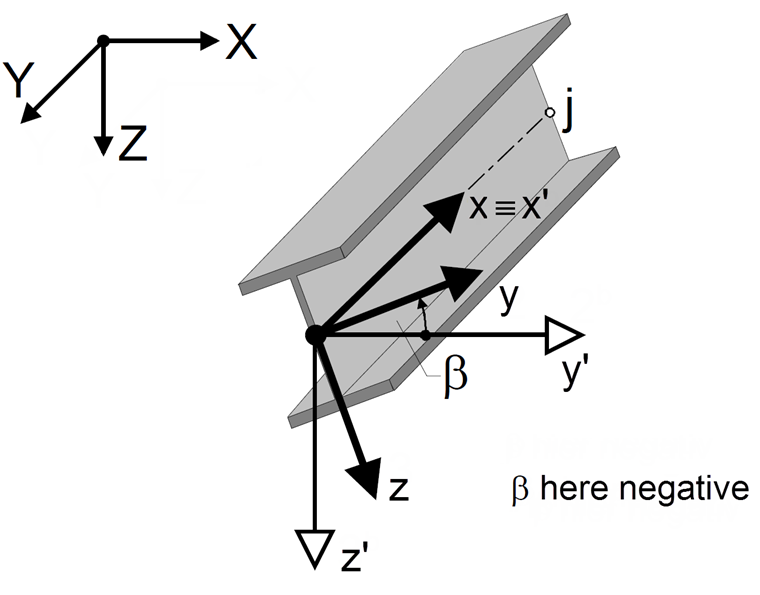
Jeżeli układ lokalny xyz jest skręcany w prawo o 90°, oś y znajduje się w położeniu osi z przed obróceniem.
Rysunek 02 przedstawia obrót skręcany w lewo. W tym przypadku kąt β należy wprowadzić jako ujemny.
Orientacja pręta w przypadku niepoziomego położenia pręta
Jeżeli pręt znajduje się w położeniu poziomym, orientacja i obrót są wyraźne, jak pokazano na rysunku 02. Jeżeli jednak pręt znajduje się w przestrzeni, program zorientuje go zgodnie z poniższymi zasadami.
Dla kąta obrotu pręta β = 0° możliwe są dwa przypadki.
1 Przypadek: Ogólne położenie pręta, β = 0°
Oś odniesienia y' jest równoległa do globalnej płaszczyzny XY. Oś odniesienia z' jest prostopadła do osi x' i y', podczas gdy jej składowa Z jest zawsze skierowana w kierunku globalnej osi Z. Jeżeli oś Z jest zdefiniowana w Danych ogólnych w dół, wskazuje ona kierunek dodatniej składowej Z; jeżeli oś Z jest zdefiniowana w górę, wskazuje w kierunku ujemnej składowej Z. Kierunki osi są zgodne z regułą prawej ręki.
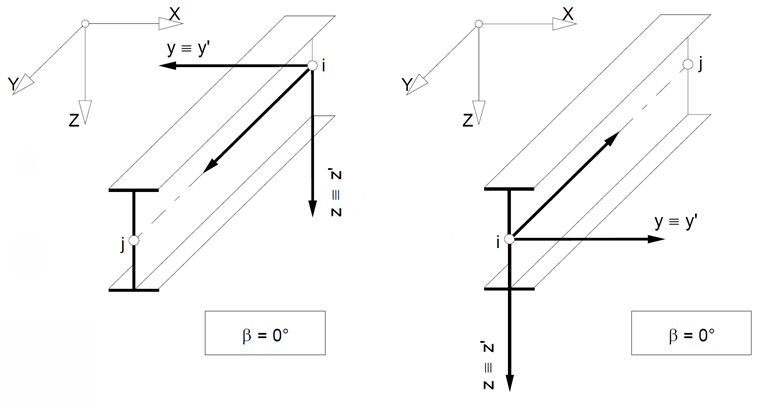
2. Przypadek: Położenie pionowe pręta, β = 0°
Oś odniesienia y' wskazuje w kierunku globalnej osi Y. Oś z jest wyznaczana przy użyciu reguły prawej ręki; jeśli β = 0°, wskazuje kierunek globalnej osi X.
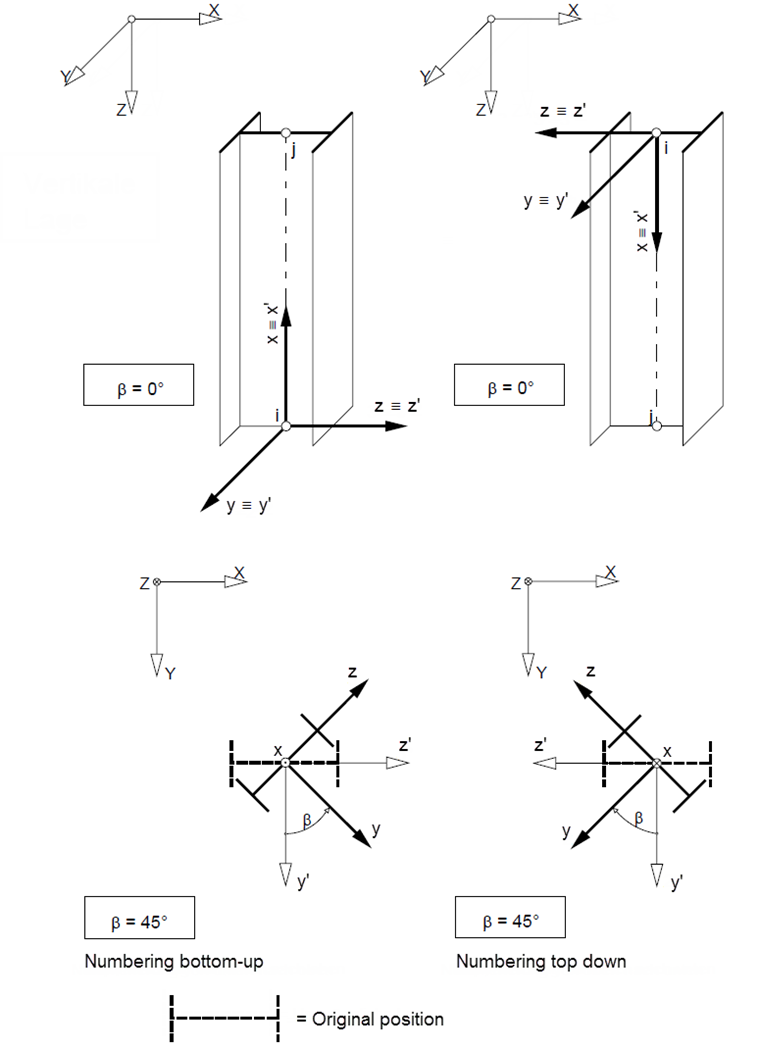
Dla kąta obrotu pręta ±90° i 180°, program przyjmuje następujące założenia dla prętów w pozycji pionowej:
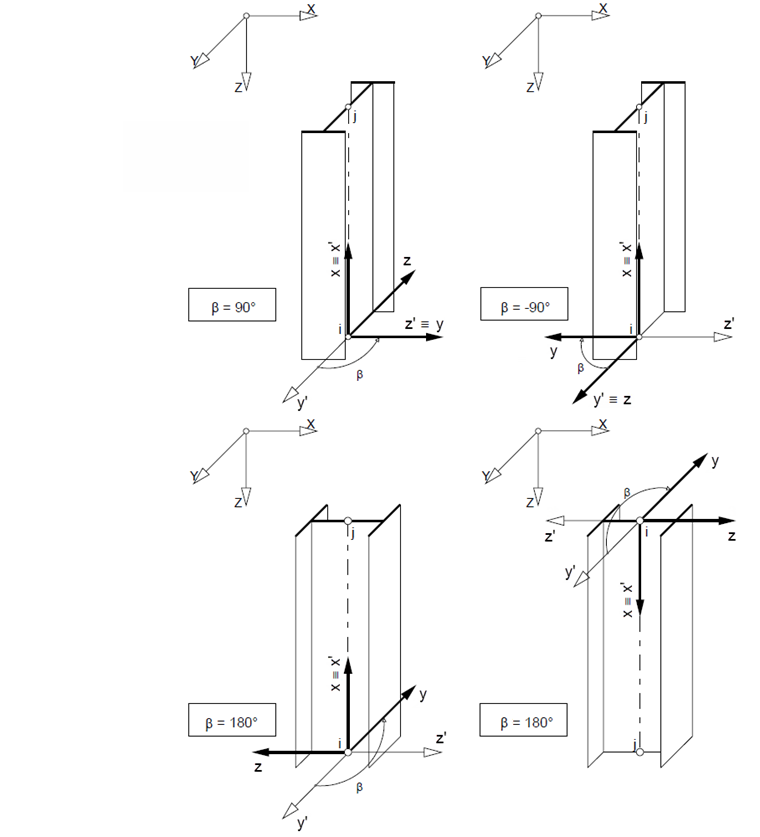
Pręt można obrócić wokół osi podłużnej tego pręta przy użyciu kąta obrotu β. Dodatni kąt odpowiada obrotowi osi y w kierunku osi z. Dla orientacji osi ważne jest, czy pręt jest definiowany od góry do dołu, czy od dołu do góry (patrz Rysunek 04 i Rysunek 05).
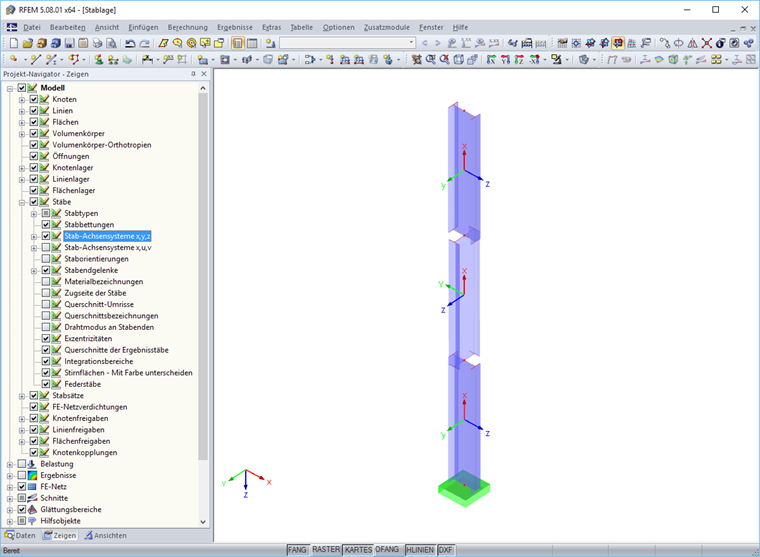
Modyfikacja osi pręta ze względu na położenie pręta
Jeżeli oś „przeskakuje” w przypadku podpierającego pręta ciągłego, przyczyną jest zwykle automatyczna klasyfikacja położenia pręta: Pozycja pręta ciągłego jest klasyfikowana jako „pionowa”, a pozycja prętów połączonych jako „ogólna”. Ogólne położenie pręta ma zastosowanie, jeżeli współrzędne X i Y dla węzłów definicji pręta są (minimalnie) różne, a więc pręt jest lekko nachylony.
Zmienne osie komplikują definicję lokalnych obciążeń i imperfekcji prętów. Wpływają również na symbole i znaki sił wewnętrznych.
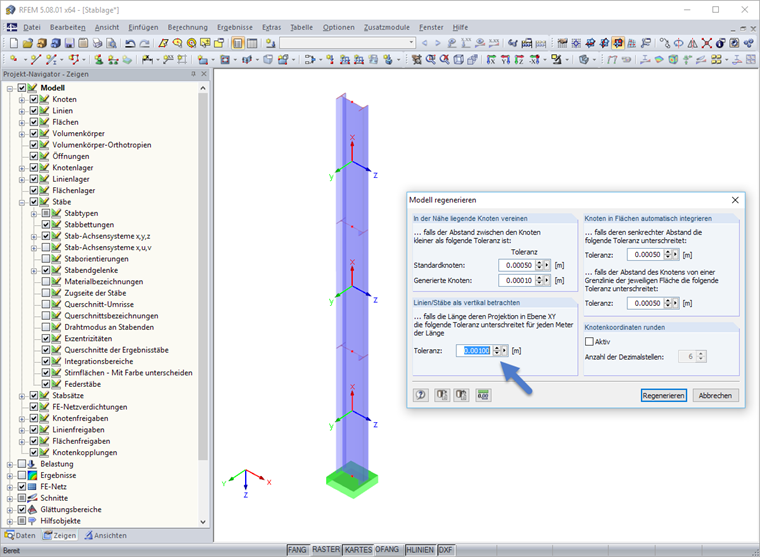
Szczególnie podczas importu modelu DXF może się zdarzyć, że współrzędne X i Y węzłów definicji nie będą identyczne we wszystkich miejscach po przecinku. Można to skorygować poprzez ręczną regulację. Lepszym sposobem jest skompensowanie odchyleń za pomocą opcji programu „Regeneruj model”, która umożliwia również tolerancje zdefiniowane przez użytkownika.
Podsumowanie
W modelu 3D orientacja pręta jest ważna dla sztywności modelu, a także dla przypisywania obciążeń lokalnych. Podczas wprowadzania pręta na podstawie węzłów definicji automatycznie definiowany jest lokalny układ osi. Następnie można dostosować orientację osi za pomocą kąta obrotu pręta. Programy RFEM i RSTAB umożliwiają szybkie i niezawodne sprawdzenie położenia pręta w renderowaniu 3D.