






本文介绍了 RFEM 和 RSTAB 如何自动设置杆件位置,以及如何在需要时通过杆件旋转角度进行调整。
局部杆件轴
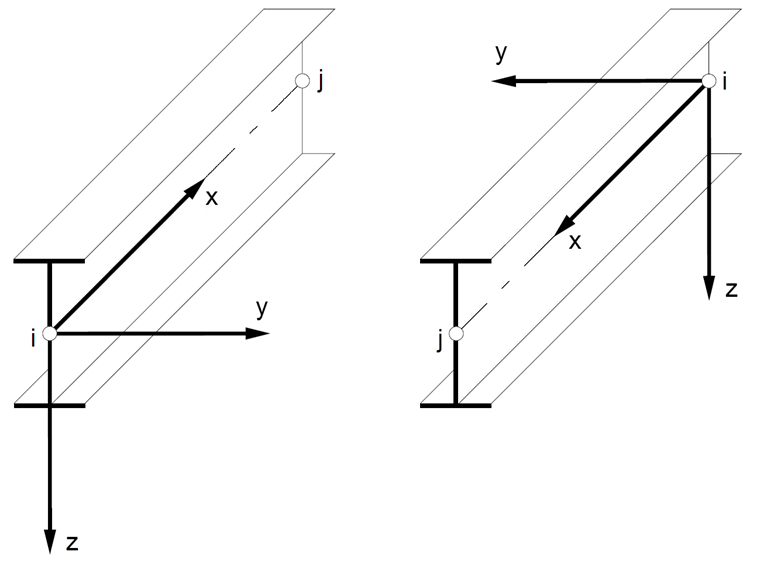
杆件坐标系的 x、y 和 z 轴用右手螺钉定义为直角。 杆件局部 x 轴始终表示杆件的重心轴。 它将初始节点连接到末端节点,同时x轴的正方向从初始节点i指向杆件的末端节点j。 在截面对称时,局部坐标轴 y 和 z 表示杆件的主轴(在非对称截面中,坐标轴分别表示为 u 和 v)。 y 轴是截面的“强”轴。
杆件转角 β
如果杆件绕其纵向轴转动,则该转动可以通过角度 β 来定义。 通过指定初始节点 i 和结束节点 j 以及旋转角度 β,可以清晰地描述位置以及杆件局部坐标系 xyz。
然后程序自动定义局部坐标轴 y 和 z 的位置: z 轴在空间中的定位方式是,全局坐标系下方向箭头的 Z 部分始终指向全局 Z 正方向。 y 轴按照右手法则得出。 从这个位置开始,可以通过旋转角度 β 旋转杆件,该角度表示局部坐标系 x,y,z 相对于参照系 x',y',z' 的旋转。 在默认设置 β = 0° 的情况下,参考系统同时也是局部系统。 当角度 β 为正时,y 和 z 方向围绕杆件纵向轴(局部 x 轴)转动,就像使用右手螺钉一样。
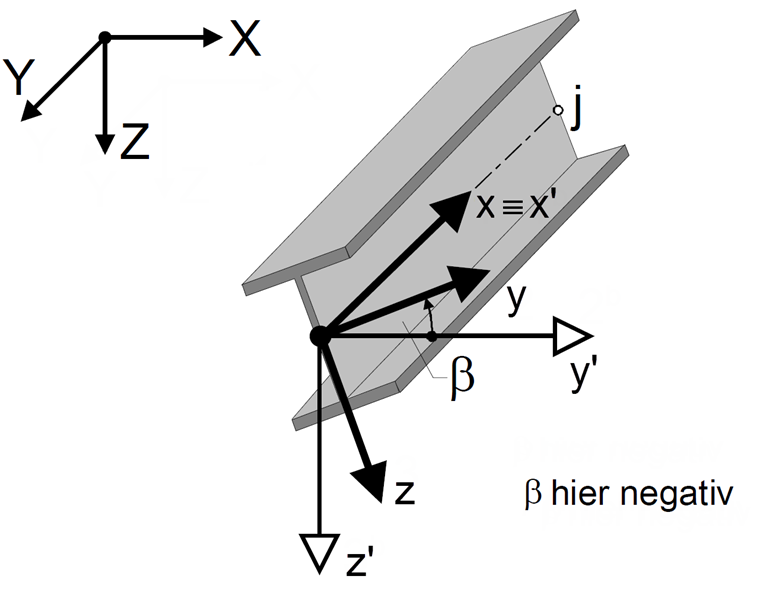
如果将局部坐标系 xyz 右旋 90°,则 y 轴位于旋转前的 z 轴位置。
图 02 显示了左旋螺钉。 在这种情况下角度 β 应该输入为负数。
杆件位置非水平时的杆件方向
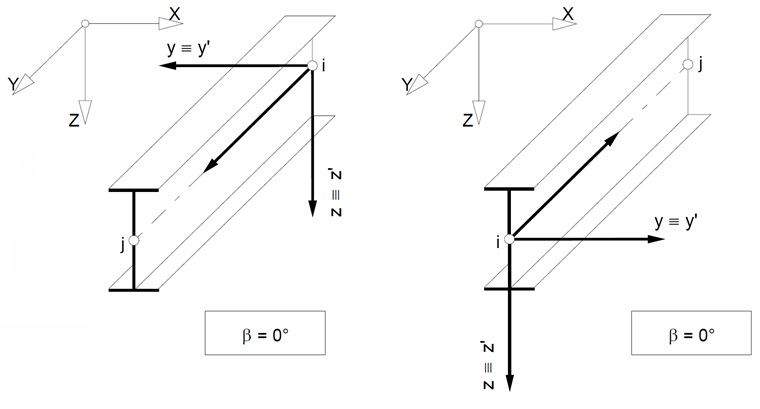
如果杆件处于水平位置,则方向和旋转是清晰的,如图 02 所示。 但是,如果杆件位于空间中,则程序会根据以下规则确定杆件的方向。
当杆件转角 β = 0° 时,可能有两种情况。
1. 工况: 杆件的基本位置,β = 0°
参考轴 y' 平行于全局 XY 平面。 参考轴 z' 垂直于 x' 和 y' 轴,而其 Z 分量始终指向全局 Z 轴。 如果在基本数据中将 Z 轴定义为向下,则表示 Z 轴正方向;如果 Z 轴向上定义,则指向 Z 分量的负方向。 坐标轴的方向遵循右手定则。
2. 工况: 杆件的垂直位置,β = 0°
参考轴 y' 指向全局 Y 轴。 z 轴是通过使用右手法则得出的。如果 β = 0°,则指向全局 X 轴。
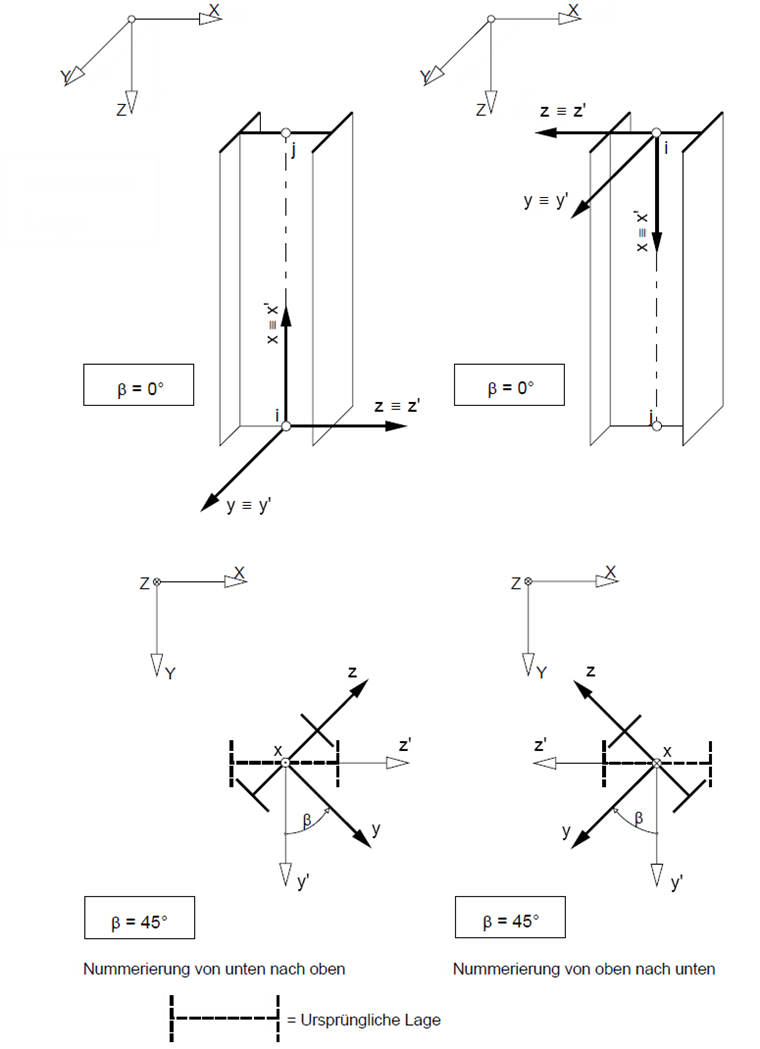
对于杆件旋转角度为 ±90° 和 180°,程序对处于垂直位置的杆件应用以下假设:
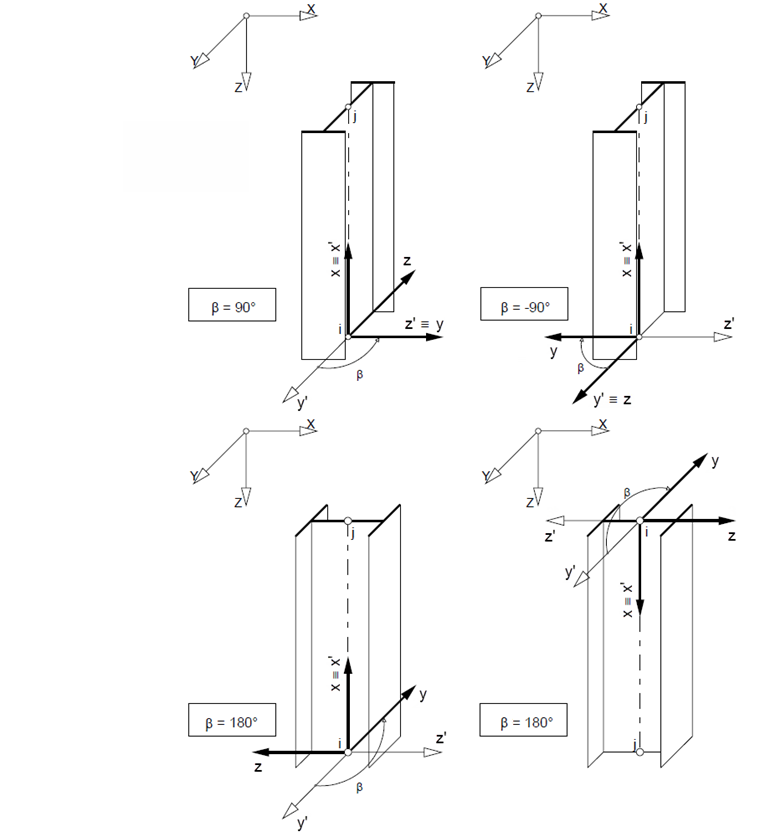
通过旋转角度 β 可以使杆件绕该杆件的纵轴旋转。 一个正角度对应于 y 轴朝 z 轴方向旋转。 无论是从上到下还是从下到上定义杆件,轴的方向都很重要(见图 04 和图 05)。
根据杆件位置调整杆件轴
如果在支承的连续杆件中轴“跳跃”,原因通常是杆件位置的自动分类: 连续杆件的位置被分类为“垂直”,连接杆件的位置为“一般”。 如果杆件的定义节点的 X 和 Y 坐标(最小)不同,则适用一般杆件位置,因此杆件略有倾斜。
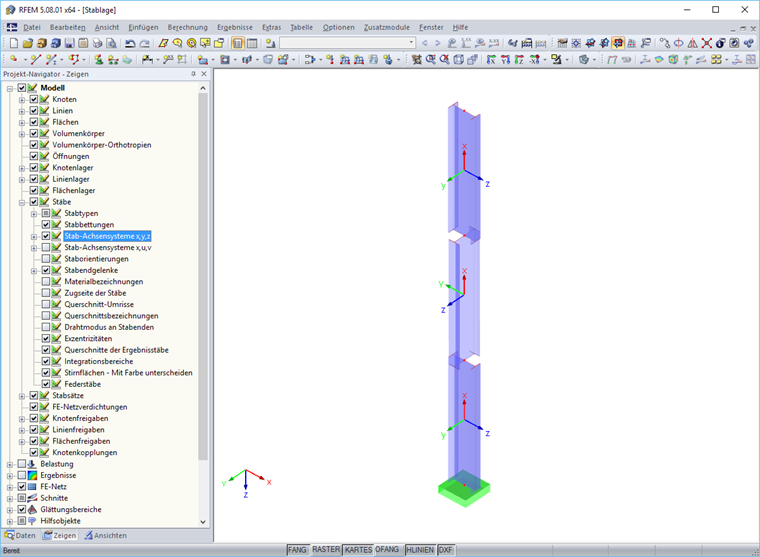
可变轴使得局部杆件荷载和缺陷的定义变得复杂。 此外内力的符号和符号也会受到影响。
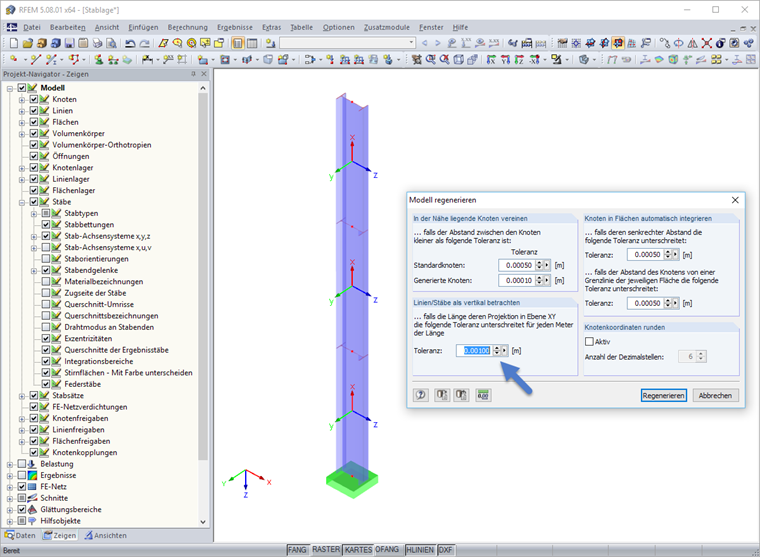
尤其是在导入 DXF 模型时,定义节点的 X 和 Y 坐标的所有小数位数都不同。 这可以通过手动调整进行纠正。 更好的方法是使用“重新生成模型”程序选项来补偿偏差,该选项也允许用户自定义公差。
小结
在 3D 模型中,杆件方向对于模型刚度以及局部荷载的分配非常重要。 输入杆件时,根据定义的节点自动定义局部坐标系。 然后可以通过杆件旋转角度来调整轴的方向。 RFEM 和 RSTAB 允许您在 3D 渲染中快速可靠地检查杆件位置。