回复:
输入缺陷时遵循以下原则:
- Die Stäbe müssen über die gleiche Stabdrehung verfügen.
- Bei der Eingabe von Imperfektionen bezieht sich die Richtung auf die lokalen Achsen y und z. B. bei unsymmetrischen Querschnitten ist auch ein Bezug auf die Hauptachsen u und v möglich.
- Durch das Vorzeichen der Imperfektionsgröße kann die Lage und Orientierung der Imperfektion beeinflusst werden.
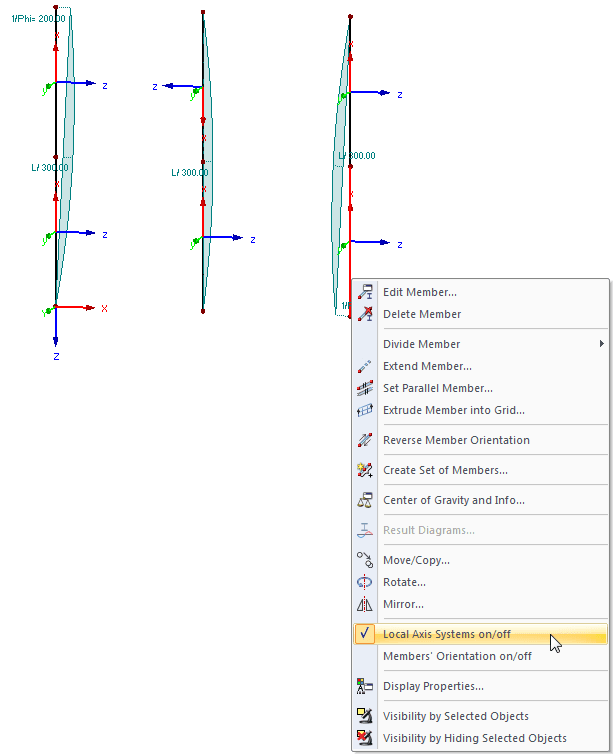
Es ist hilfreich, die lokalen Stabachsensysteme anzeigen zu lassen. Hierzu klicken Sie einen Stab mit der rechten Maustaste an. Im Kontextmenü können Sie die Anzeige der Stab-Achsensysteme aktivieren.