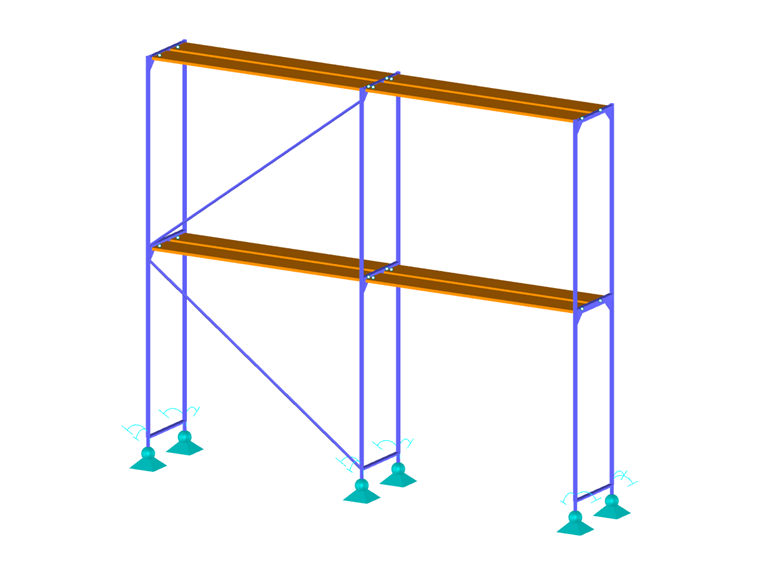
它们通常通过板状支座构造来保证结构的稳定性。 底座有助于将荷载分布在一个相对较大的作用区域内,并且通过板的延伸形成稳定的杠杆臂以吸收支座所受到的弯矩。 考虑到平衡问题,与单纯的铰接情况相比,这种支座还受到垂直荷载导致的弯矩。 从理论上来说,在这种情况下,支座板一开始相当于是铰接。 然而,随着柱杆上扭转的增大,就会产生一定的弯矩阻力。 在下列规范中将根据结构类型对这种特殊组合关系进行说明:
- 欧洲规范 EN 12811-1: 临时建筑结构 - 第1部分: 脚手架 - 搭建效率与结构设计
- 欧洲规范 EN 1065: 钢结构支架 -产品规格、结构设计和通过计算和实验进行的验算
通过点击非线性选项卡可以看到“脚手架”的设置部分,RFEM 提供了根据标准制定的解决方案,那就是可调节的节点支撑旋转自由度 φX ' 和 φY' 。
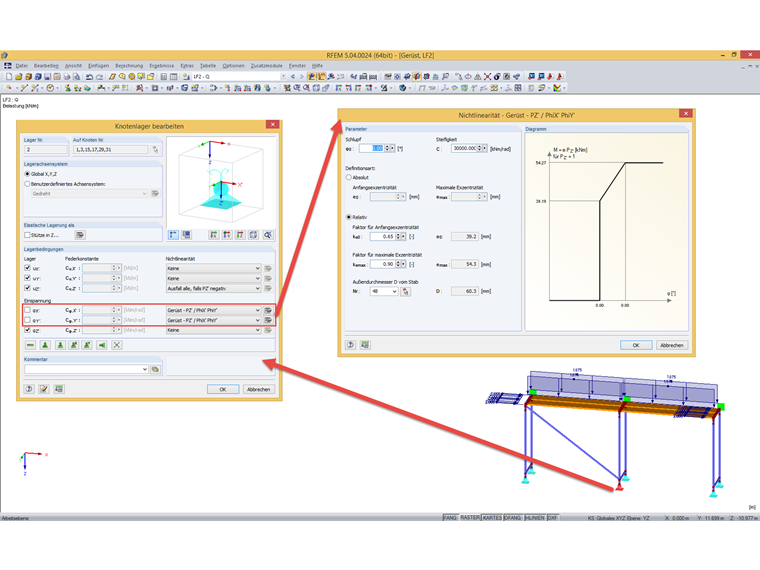
激活节点支座对话框中的选项后,可以根据受影响支座的 Mφ - 图表及其参数
- φ0 = 滑移
- C = 弹簧刚度
- e0 = 初始偏心 (取决于 ke0 以及 D)
- emax = 极限偏心 (取决于 kemax 以及 D)
- ke0 = 初始偏心系数
- kemax = 最大偏心系数
- D = 杆件外径
- PZ' = Z' 方向上的支座反力
来创建模型。
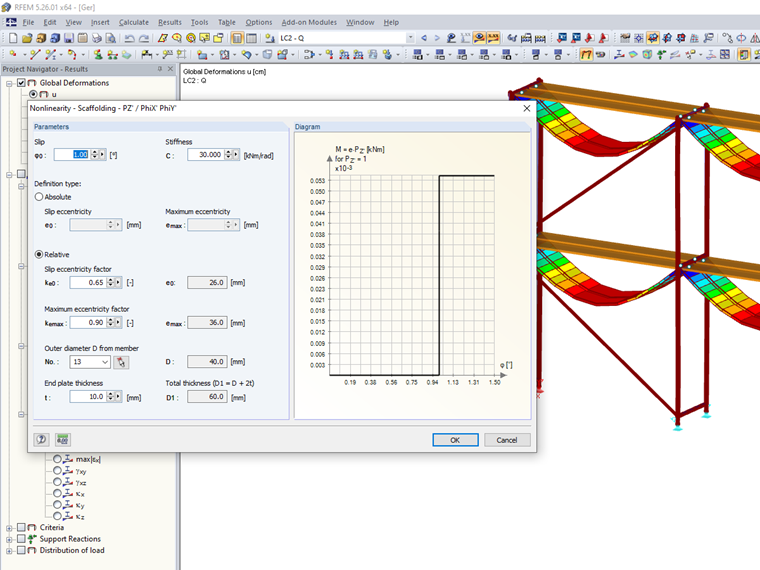
支座在旋转角度 φ0 内不受到弯矩作用。 在这之后,直到 Me0 = ke0 ⋅ D ⋅ PZ' 的时候,扭矩一直保持不变。 在弯矩大小为 Me0 至 Memax = kemax ⋅ D ⋅ PZ' 之间时,支座的扭转弹簧强度为 C。 弯矩在到达 Memax 后进入屈服阶段。