







杆件之间的端部释放
用户可以使用该功能将杆件之间的端部铰链设置为杆件铰。 该定义类似于静力不确定的条件,以确定结构的静力不确定度:
n = r + 3 m − 3 n − h ≥ 0
值:
r 是支座反力
m 是杆件,
n 是节点,
h 是铰。
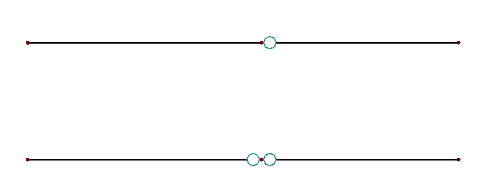
因此,在一个节点处,与相同自由度(h = m − 1)的杆件相比,少分配一个铰是必要的。 图02显示了有效的定义(上)和无效的定义(下)。
面之间的端部释放
面之间的末端释放的定义更复杂,但与杆件相同。 当在一条线上有两个铰, 与杆件不同,面等结构不会那么快就不稳定。 部分原因是面在平面内可能会翘曲,因此不再是可动面。 图 03 中定义铰时,
节点 – 混凝土结构
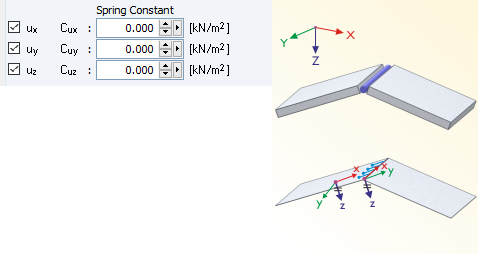
最简单的线铰应用就是上面提到的混凝土面之间的连接。 用于模拟混凝土结构中的装配间隙。
此时将释放ux 、uy和uz方向的线铰(图04)。 在这种情况下我们建议您也释放线的旋转。 对于杆件和面有铰的杆件,选择释放的自由度。
半刚性连接 – 木结构
在木结构中,例如正交胶合木或人造板,面之间的分隔通常是灵活的。 该类型的用户可以使用【线铰】来模拟两个面之间的弹簧模型。 然而,在木结构中的弹簧实际上只在面的拉力方向上起作用。 人造板、人造板或正交胶合木板之间几乎是刚性的压力接触。 因为必须考虑非线性属性,所以建模这样的末端释放要复杂得多。
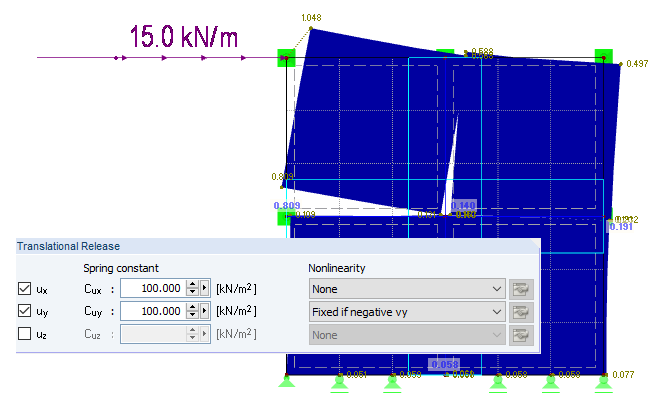
非线性在建模、结果评估、计算时间、未知数数量等方面也存在缺点。 下面介绍如何考虑非线性压接触与线性铰。 图 05 显示的结构体的四个面之间采用半刚性连接。 支座节点位于 ux方向自由支座。 左侧显示了一个面与虚拟弹簧 ux = 100 kN/m²(线的纵向)和 uy = 100 kN/m²(垂直于线的方向)的半刚性连接。 杆件右侧为 ux = 100 kN/m² 方向相同连接。 uy方向刚性。 端部水平荷载为 15 kN/m。
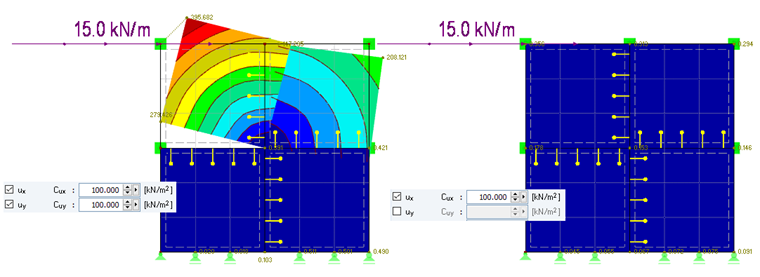
正如您在图 05 中所看到的,左侧模型的变形太大。 此外,上面的面还与下面的面相交。 实际中不会发生变形。 右侧模型的变形似乎是真实的。 图06显示了面之间的剪切应变nxy 。 紧固件设计按照该值进行计算。 无论值如何,您可以看到左侧模型的剪切应变在两个方向上总是(正和负)出现超临界失效。 因为程序会显示两个面的结果,并且两侧都考虑了铰的释放。 在右侧模型中,剪切应变从中心到边缘逐渐减小。 这是由于所连接面的刚度重叠。
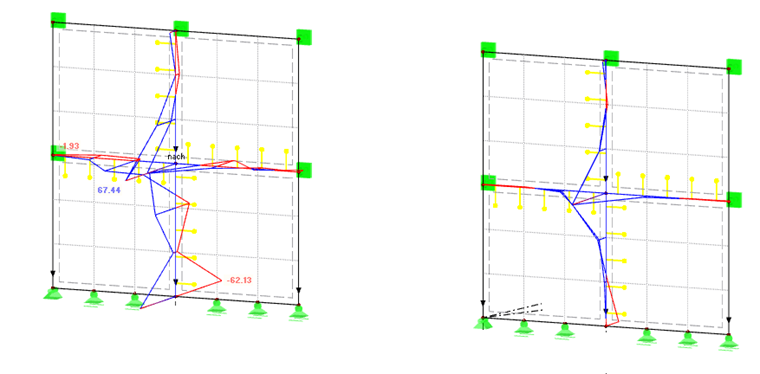
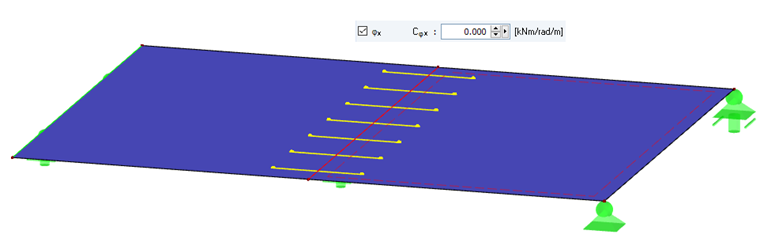
图 07 显示了在 ny方向上的力。 在线上显示的力是参照局部面的坐标轴。
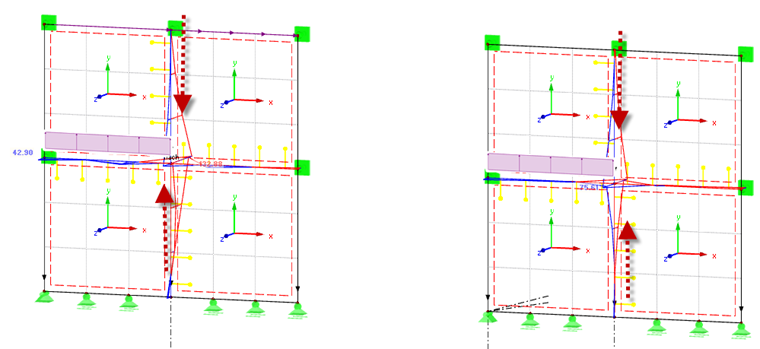
在图 07 中力的方向用红色和蓝色虚线箭头表示。 左侧模型的竖向轴力分布受到扰动,这甚至导致与下部的拉力分量相关的超临界失效。 从水平轴方向看,左侧模型在 y 方向上有非常大的拉力。 在右侧模型中,竖向轴上的轴力从零开始,然后向中心增加。 横轴上的力最小。 右边模型的力分布是最真实的。
线释放和线铰理论
RFEM 提供了定义线释放的选项,可以考虑模型的非线性,例如压力接触传递部分。 线铰和线释放的理论基础是相同的。 两者都采用双节点工艺。 如果定义铰支座,则会在原始节点处虚拟生成两个节点。 这些节点然后通过弹簧相互连接。 一旦在该弹簧上定义了附加非线性(例如压力接触),就将执行变形分析,以检查条件是否满足。 这种方法的专业术语是缺陷法。 示意图08
![罚金法[1]](/zh/webimage/009048/505809/08-de.png)
也可以通过力方法进行对齐。 图片08中所示的非线性由相应方向上的力控制。 公式 1 显示了初始等效刚度 k 单位 N/m 的示意图。 本文中不包含对当前结构的任何推导和说明。
公式 1:
公式 2 显示了添加了 Lagrange 乘数的相同方程组。
公式 2:
只是方程的后半部分乘以系数 λ 不同。 现在可以清楚的看到,至少在第一步中使用检修系数和拉格朗日乘数得出的结果是相同的。 对于更复杂的结构,最好使用拉格朗日乘子。 在初始值为零之后,迭代方案通过Langrange乘数进行扩展。
.线释放
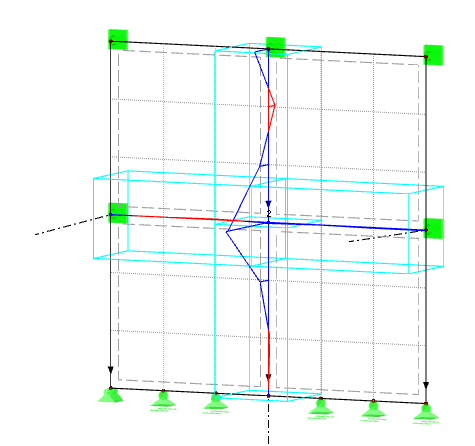
通过在 RFEM 中定义线释放,可以充分考虑上述示例的非线性。 与在 ux方向末端释放的刚性模型一样,非线性压力接触为末端释放的情况下,发生类似的变形(图09)。
对于竖向连接,如只有一个端部释放的结构,内力 nxy有相同的内力分布(图10)。 只有模型右侧的水平线发生变化,因为该面完全处于压力作用下。
定义面的侧面
无论选择线释放还是线铰来定义末端释放,最重要的是它要能正确显示模型。
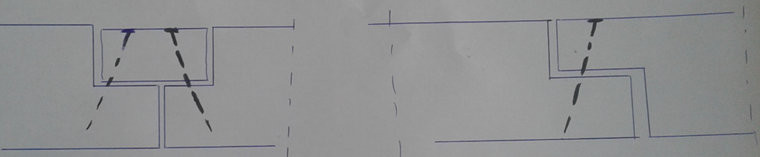
图 11 显示的是带有保护层(左)和切口(右)的钉子。 图 12 显示了相应的结构模型。 在进行结构建模时必须要定义 ux方向的铰接点,在连接的纵向上,两次在左侧,一次在右侧。 根据胡克定律,左侧模型有一个双端释放装置。

小结
在 RFEM 中使用“线释放或线铰”选项可以考虑面之间的铰, 由于使用线铰计算,使得结构体系的结果评估和建模变得更加容易。 否则可能会出现计算结果不准确的情况。 “线释放”除了可以考虑面之间的末端释放外,还可以考虑面上杆件的释放。