






基本
对于吊车梁,除了承载能力极限状态外,正常使用极限状态也非常重要。 遵守变形极限值不仅关系到正常使用性,还关系到减少磨损。 因此,大的水平变形会导致吊车的更大的倾斜,从而导致增加的轨道磨损。 此外,还必须尽可能避免竖向变形,以避免起重机在运行过程中振动过大。 最后,还需要限制吊车梁的倾角,否则吊车将无法在满载下移动。
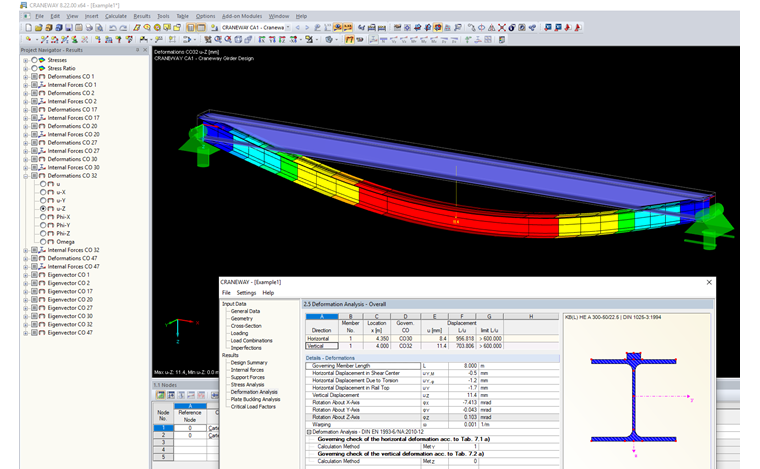
方法 1:变形参照未变形的坐标系
方法 1 适用于有固定支座的简支梁。
适用于以下边界条件:
变形如下:
计算规则为:
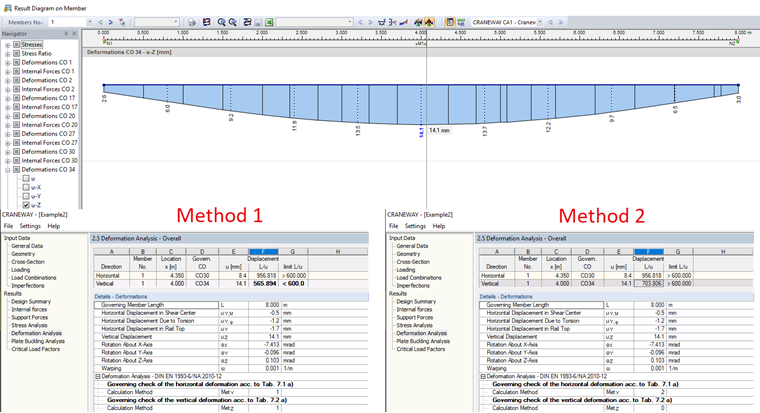
方法 2:变形参照变形体系
如果考虑柔性支座为支座定义弹簧常数,那么可以使用详细信息中的方法 2。 示例文件 2 中包含了为竖向支座定义的弹簧,您可以在本文下方下载该文件。 图02显示了方法1和方法2的区别。
适用于以下边界条件:
变形如下:
计算规则为:
按照这种方法,支座的弹簧刚度也应取大的值。
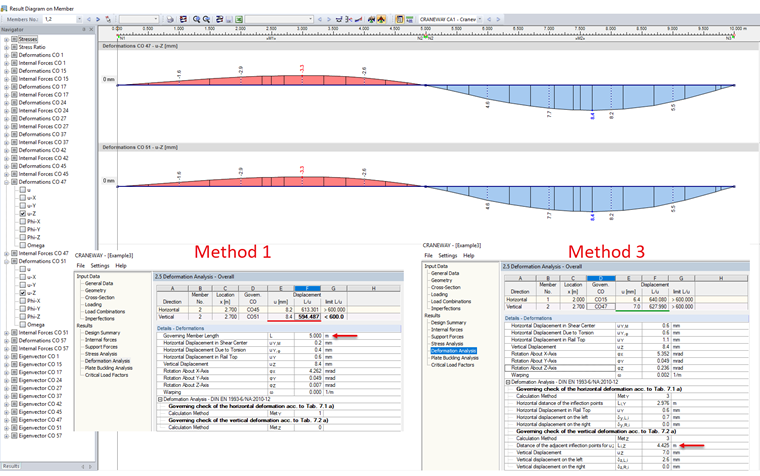
方法 3:变形结构体系的变形相关拐点
该方法适用于连续梁。 与单跨梁相比,在确定多跨梁的容许变形时使用支座间距没有意义。 这会得出保守的、不经济的结果。 为了确定主导长度,在方法 3 中确定受弯线的拐点。
适用于以下条件:
在拐点处:
变形如下:
这种方法的另一个优点是支座可以具有不同的弹簧刚度。
吊车梁与悬臂梁
对于悬臂梁,弯曲线类似于单跨梁的弯曲线对折。 因此对于方法1,计算如下:
如果激活方法 3,则通过将悬臂梁安装在支座上绕局部坐标轴 y 轴来检查悬臂梁的极限变形。
使用条件为:
方法1的示例文件4的结果悬臂:
→ 不满足
换句话说:
方法3的示例文件4的结果悬臂梁:
从图中可以看出,该悬臂梁未达到方法 1 中的容许变形。 然而,在欧洲规范 EN 1993-6 中的附录中表 7.2 a) 行规定了容许垂直变形。
合作的老师。概述总结
为了确保吊车系统正常工作,必须限制变形和位移。 因此也限制了磨损。 如果满足正常使用极限状态设计的极限状态,通常不需要对吊车梁进行振动设计。
