回复:
面支座的定义应尽可能接近实际。 Die Erfahrung zeigt, dass der Gleichungslöser damit am effektivsten arbeitet. Oft werden zur Vereinfachungen Freiheitsgrade als "fest" definiert. Dies kann jedoch große Auswirkungen auf die Gesamtsteifigkeitsmatrix haben und numerische Probleme verursachen (siehe Bild 01).
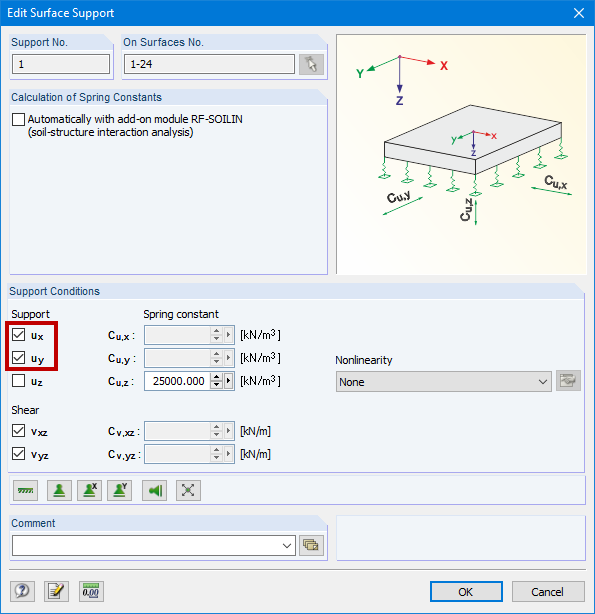
Besser ist es hier mit Federn zu arbeiten, um die numerischen Probleme zu umgehen. Oft genügt bereits die Definition von sehr steifen Federn (siehe Bild 02). Selbiges gilt auch für die Bettung senkrecht zur Fläche. Hierfür finden Sie weitere Informationen in [1] sowie in den Links unterhalb dieser FAQ.