






Телескопическая стрела, например, строительной машины, передает свои силы между частями механически.
Это специальное распределение сил можно смоделировать в RSTAB 9 следующим образом:
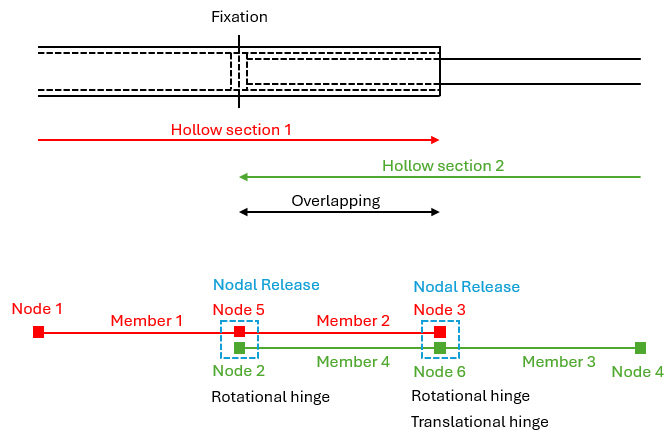
Соединение на рисунке состоит из четырёх стержней. В зоне перекрытия друг с другом соединены два стержня (стержни 2 и 4). Стержни, лежащие друг на друге, можно создать с помощью освобождения узлов. Для этого в узле 2 необходимо задать освобождение узла, освобождающее стержни 1 и 2. За счёт освобождения узла создается узел 5, который служит конечным узлом для стержня 1 и начальным узлом для стержня 2. Стержни 1 и 2 брутально жёстко связаны.

Можно определить перекрывающий стержень 4 между узлами 2 и 3. В узле 3 также следует задать освобождение узла, освобождающее стержни 3 и 4. Освобождение узла создаёт узел 6, который служит конечным узлом для стержня 4 и начальным узлом для стержня 3. Стержни 3 и 4 жёстко связаны.

Для того чтобы сила передавалась через пару сил только на концах перекрывающихся стержней в соответствии с конструкцией, необходимо задать связь между узлами 2 и 5, а также между узлами 3 и 6 типа «освобождение узла».


При этом требуется, чтобы моментное соединение в освобождении узлов между узлами 2 и 5, а также между узлами 3 и 6, обеспечивало передачу изгибающего момента между красной (стержни 1 и 2) и зеленой (стержни 3 и 4) линиями с использованием пары сил на концах перекрывающихся стержней. Соединение нормальной силы в освобождении узла между узлами 3 и 6 должно обеспечить передачу нормальной нагрузки только при запланированной фиксации между зелёной и красной линиями.
