






Zakłada się, że napięcie mechaniczne, podobnie jak w przypadku teleskopowego wysięgnika maszyny budowlanej, przenoszone jest między elementami konstrukcji.
W RSTAB 9 można to rozwiązać w następujący sposób:
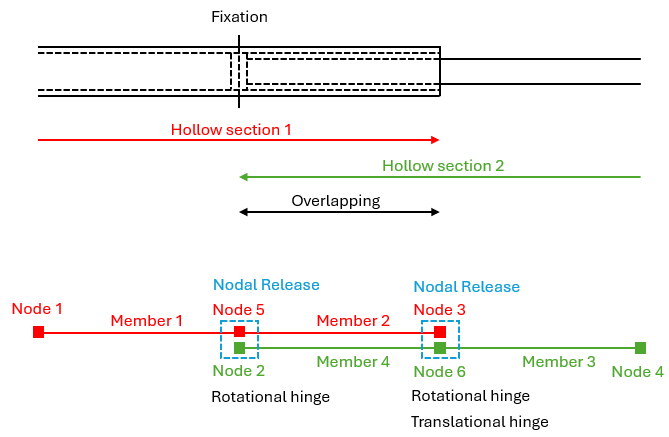
Połączenie zaciskowe na rysunku składa się z czterech prętów. W obszarze zakładkowym dwa pręty (pręty 2 i 4) leżą na sobie. Pręty leżące na sobie można modelować za pomocą zwolnień węzłowych. Węzeł 2 wymaga zastosowania zwolnienia węzłowego, które zwalnia pręty 1 i 2. Zwolnienie węzłowe tworzy węzeł 5, który pełni funkcję węzła końcowego pręta 1 oraz węzła początkowego pręta 2. Pręty 1 i 2 są sztywno połączone na zginanie.

Pręt zakładkowy 4 można zdefiniować między węzłami 2 a 3. W węźle 3 również należy zastosować zwolnienie węzłowe, które zwalnia pręty 3 i 4. Zwolnienie węzłowe tworzy węzeł 6, który pełni funkcję węzła końcowego pręta 4 oraz węzła początkowego pręta 3. Pręty 3 i 4 są sztywno połączone na zginanie.

Aby siła była przenoszona zgodnie z konstrukcją za pomocą pary sił tylko na końcach prętów zakładkowych, należy zdefiniować warunki sprzężenia między węzłami 2 i 5 oraz węzłami 3 i 6 w przypadku typu zwolnienia węzłowego.


Przegięcie na zginanie w zwolnieniach węzłowych między węzłami 2 i 5 oraz między węzłami 3 i 6 zapewnia, że obciążenie momentem zginającym między czerwonymi (pręty 1 i 2) a zielonymi zestawami prętów (pręty 3 i 4) przekazywane jest za pomocą pary sił na końcach prętów zakładkowych. Przegięcie osiowe w zwolnieniu węzłowym między węzłami 3 i 6 zapewnia, że obciążenie osiowe jest przenoszone tylko w planowanym połączeniu pomiędzy zielonymi i czerwonymi zestawami prętów.
