






说明
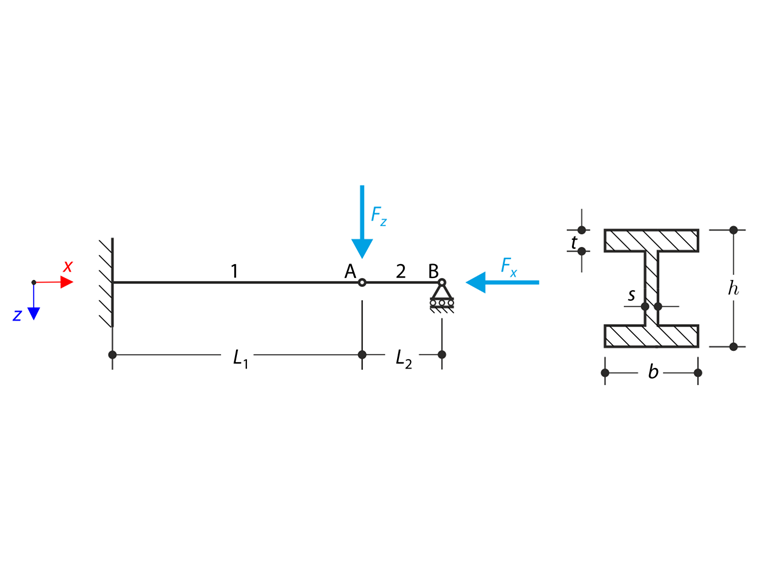
一个由工字型截面组成的结构,左端完全固定,右端嵌入滑动支座。该结构由两个节段组成。本示例忽略自重。通过几何线性分析和二阶分析,确定结构的最大挠度 uz,max、固定端的弯矩 My、节段 2 的转角 &svarphi;2,y 以及反力 RBz。该验证示例基于 Gensichen 和 Lumpe 介绍的示例(参见参考文献)。
| 材料 | 钢材 | 弹性模量 | E | 210000.000 | MPa |
| 泊松比 | ν | 0.300 | - | ||
| 几何尺寸 | 结构 | 节段长度 1 | L1 | 6.000 | m |
| 节段长度 2 | L2 | 1.200 | m | ||
| 截面 | 高度 | h | 400.000 | mm | |
| 宽度 | b | 180.000 | mm | ||
| 腹板厚度 | s | 10.000 | mm | ||
| 翼缘厚度 | t | 14.000 | mm | ||
| 荷载 | 轴向力 | Fx | 100.000 | kN | |
| 横向力 | Fz | 0.500 | kN | ||
解析解
几何线性分析
首先进行几何线性分析。在此情况下,不考虑轴向力 Fx。然后,该问题可以看作一个仅承受横向力 Fz 的长度为 L1 的悬臂来解决。最大挠度 uz,max 可以使用莫尔积分计算,并得出表达式:
固定端弯矩可按下式计算:
节段 2 的转角 φ2,y 根据几何条件计算如下:
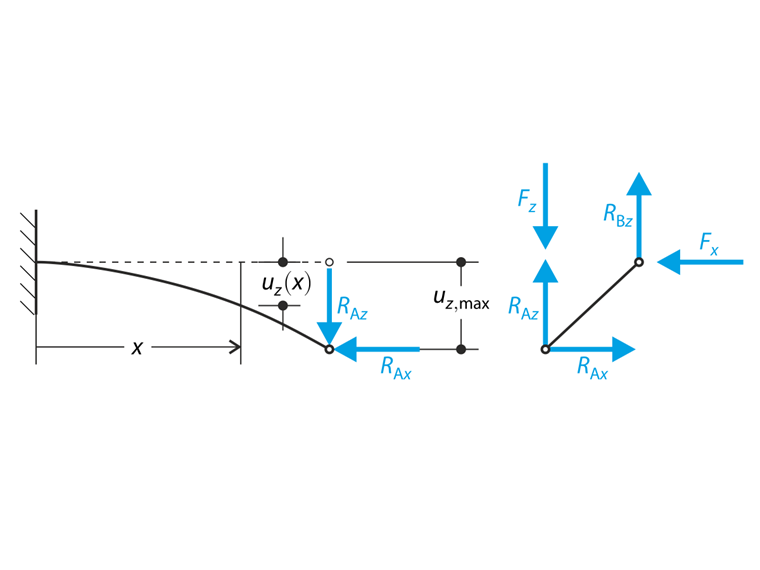
考虑轴向力 Fx 的零效应,滑动铰支座中的反力 RBz 可以从以下自由体图所示的自由体图中获得。
二阶分析
由于轴向力 Fx 的影响不可忽略,应考虑二阶分析。因此,考虑了轴向力 Fx,它对弯矩产生了附加贡献。根据自由体图,该问题可以通过各节段的自由体图来描述。未知反力可以从平衡方程中获得,然后可以写出弯矩公式。
解可以通过欧拉-伯努利微分方程求得。
考虑边界条件,可以找到微分方程的解,并计算出结构的最大挠度。
固定端弯矩可按下式计算:
节段 2 的转角 φ2,y 根据几何条件计算如下:
滑动铰支座中的反力 RBz 结果为:
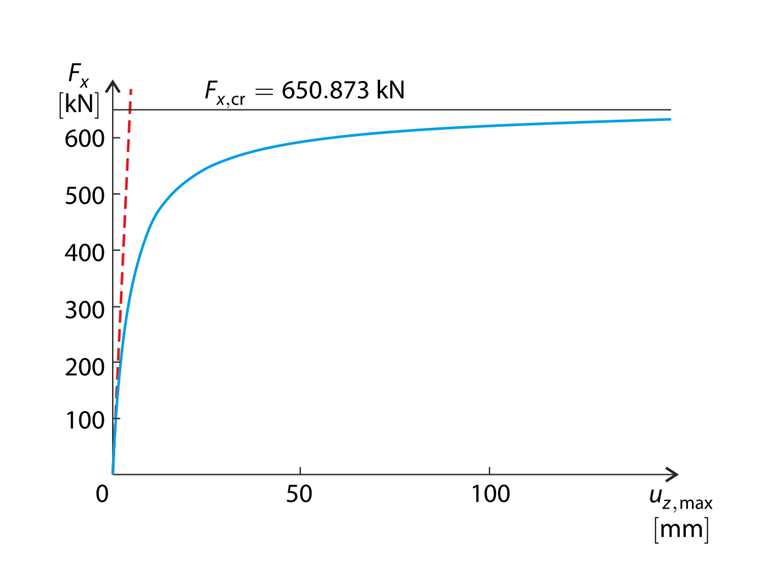
显而易见,轴向力 Fx 的影响相当大。在给定荷载下,二阶分析情况下的结构总挠度比几何线性分析情况下大约大 18%。几何线性分析和二阶分析的比较在关系图中给出,考虑了荷载力之比 Fz = Fx/200。显然,当荷载更大时,这些分析之间的差异更显著。二阶分析解趋近于水平渐近线。数值解给出水平渐近线的值为 Fx,cr = 650.873 kN。
RFEM 和 RSTAB 设置
- 在 RFEM 5.05、RSTAB 8.05 和 RFEM 6.01、RSTAB 9.01 中建模
- 单元数量为 2(每个杆件一个单元)
- 增量数量为 5
- 使用各向同性线弹性材料模型
- 结构使用杆件建模
- 忽略杆件的剪切刚度
结果
| 几何线性分析 | 解析解 | RFEM 6 | 比值 | RSTAB 9 | 比值 |
| uz,max [mm] | 0.743 | 0.743 | 1.000 | 0.743 | 1.000 |
| My(0) [kNm] | 3.000 | 3.000 | 1.000 | 3.000 | 1.000 |
| φ2,y [mrad] | 0.619 | 0.619 | 1.000 | 0.619 | 1.000 |
| RBz [kN] | 0.000 | 0.000 | - | 0.000 | - |
| 几何线性分析 | 解析解 | RFEM 5 | 比值 | RSTAB 8 | 比值 |
| uz,max [mm] | 0.743 | 0.743 | 1.000 | 0.743 | 1.000 |
| My(0) [kNm] | 3.000 | 3.000 | 1.000 | 3.000 | 1.000 |
| φ2,y [mrad] | 0.619 | 0.619 | 1.000 | 0.619 | 1.000 |
| RBz [kN] | 0.000 | 0.000 | - | 0.000 | - |
| 二阶分析 | 解析解 | RFEM 6 | 比值 | RSTAB 9 | 比值 |
| uz,max [mm] | 0.878 | 0.878 | 1.000 | 0.878 | 1.000 |
| My(0) [kNm] | 3.527 | 3.527 | 1.000 | 3.527 | 1.000 |
| φ2,y [mrad] | 0.732 | 0.732 | 1.000 | 0.732 | 1.000 |
| RBz [kN] | -0.073 | -0.073 | 1.000 | -0.073 | 1.000 |
| 二阶分析 | 解析解 | RFEM 5 | 比值 | RSTAB 8 | 比值 |
| uz,max [mm] | 0.878 | 0.878 | 1.000 | 0.878 | 1.000 |
| My(0) [kNm] | 3.527 | 3.527 | 1.000 | 3.527 | 1.000 |
| φ2,y [mrad] | 0.732 | 0.732 | 1.000 | 0.732 | 1.000 |
| RBz [kN] | -0.073 | -0.073 | 1.000 | -0.073 | 1.000 |
,_LC1__LI.jpg?mw=760&hash=dc8e32cc15e1bd8d6d238956c9f1c615aa29a734)