Tanto los contactos de superficie como el tipo de contactos de superficie pueden definirse a través de las entradas asociadas en el navegador de datos. Los primeros se organizan en "Objetos especiales", y los segundos en "Tipos para objetos especiales". Más sobre su definición se mostrará en el ejemplo de la Imagen 1 mediante la creación de una conexión entre la Superficie No. 2 y la Superficie No. 3.

El cuadro de diálogo "Nuevo contacto de superficie" se muestra en la Imagen 2. Como se indica, el procedimiento para definirlo es bastante sencillo. Lo primero que debe hacer es ingresar los números de las superficies entre las cuales se está creando el contacto. Así, defina una de las superficies como "Grupo 1" y la superficie paralela como "Grupo 2".
También puede usar el botón "Seleccionar individualmente" para seleccionar las superficies gráficamente. Tenga en cuenta que cada grupo también puede consistir en varias superficies. Estos grupos de superficies no tienen que estar exactamente uno encima del otro, y no deben estar en el mismo plano.
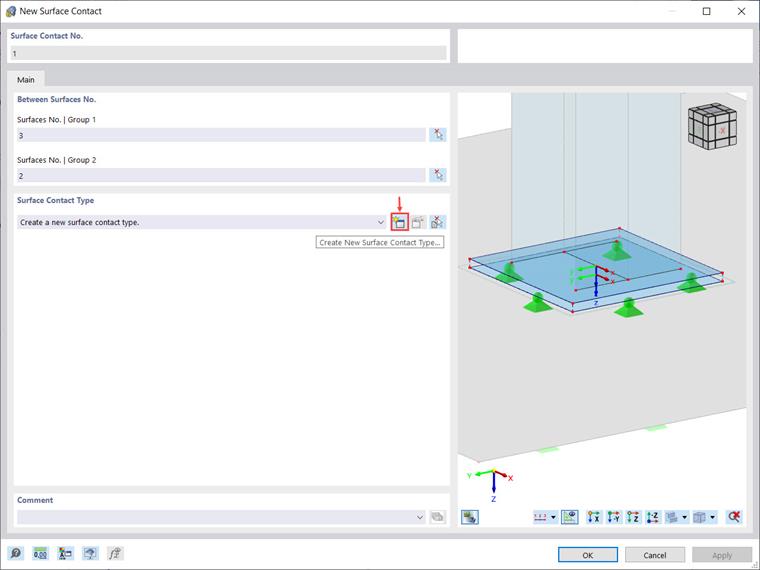
Una vez seleccionadas las superficies de interés, se le pedirá que asigne el tipo de contacto de superficie. Si ya existe uno, puede seleccionarlo de la lista. De lo contrario, puede definir uno nuevo abriendo el cuadro de diálogo asociado a través del ícono "Crear nuevo tipo de contacto de superficie" (Imagen 2). El cuadro de diálogo para definir un nuevo tipo de contacto de superficie también está disponible a través de la entrada "Tipo de contacto de superficie" en el navegador de datos (mostrado en la Imagen 1).
Por lo tanto, puede definir el tipo de contacto mientras define el contacto en sí (como en la Imagen 2), o puede hacerlo de antemano y luego seleccionarlo de la lista en el cuadro de diálogo "Nuevo contacto de superficie". Este último enfoque se muestra en el video de este artículo de la Base de Conocimientos.
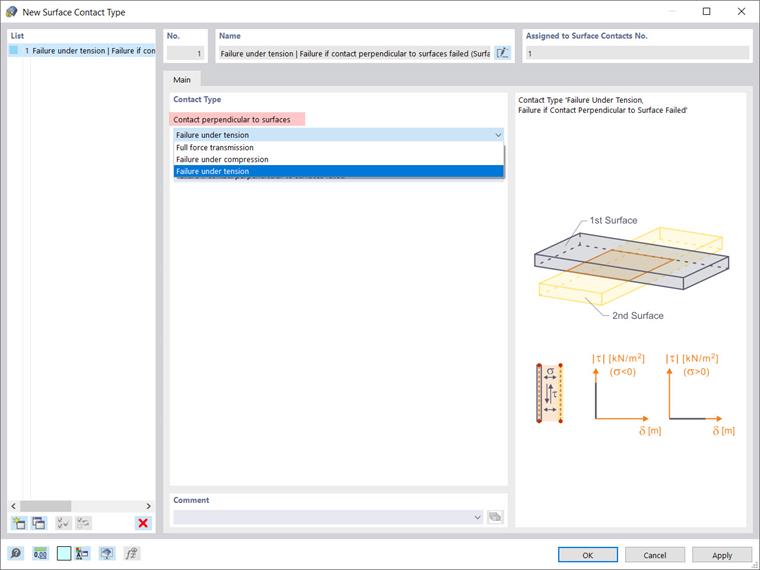
Ambos enfoques conducen a la definición de los tipos de contacto de superficie como se muestra en la Imagen 3. Dado que el tipo de contacto de superficie controla las fuerzas que se transfieren entre las superficies, es necesario primero establecer las propiedades de contacto perpendiculares y paralelas a las superficies.
En la lista "Contacto perpendicular a las superficies", puede seleccionar una de las siguientes tres opciones: transmisión completa de fuerzas (es decir, transferencia de fuerzas de tracción y compresión entre las superficies); fallo bajo tracción (es decir, el contacto se libera tan pronto como las superficies se alejan entre sí); y fallo bajo compresión (es decir, solo se transfieren fuerzas de tracción entre las superficies).
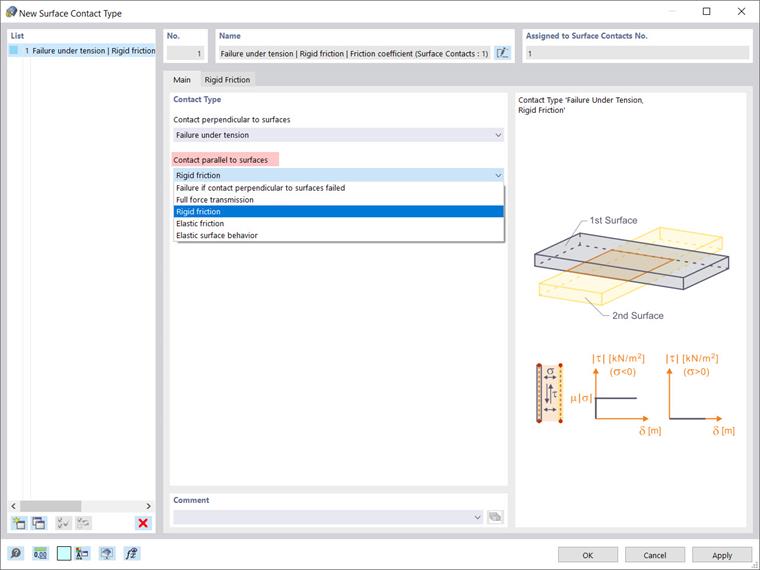
En la lista "Contacto paralelo a las superficies", por otro lado, hay cinco opciones que le ayudan a describir cómo se transfieren las fuerzas de corte entre las superficies (Imagen 4). Puede definir, por ejemplo, que no se transfieran fuerzas de corte si no hay contacto de tensión o compresión entre las superficies seleccionando "Fallo si el contacto perpendicular a las superficies falló".
También puede elegir "Transmisión completa de fuerza" y todas las fuerzas de corte se transferirán, independientemente de si el contacto es efectivo perpendicular a las superficies. Las otras tres opciones a su disposición son: fricción rígida, fricción elástica y comportamiento superficial elástico.
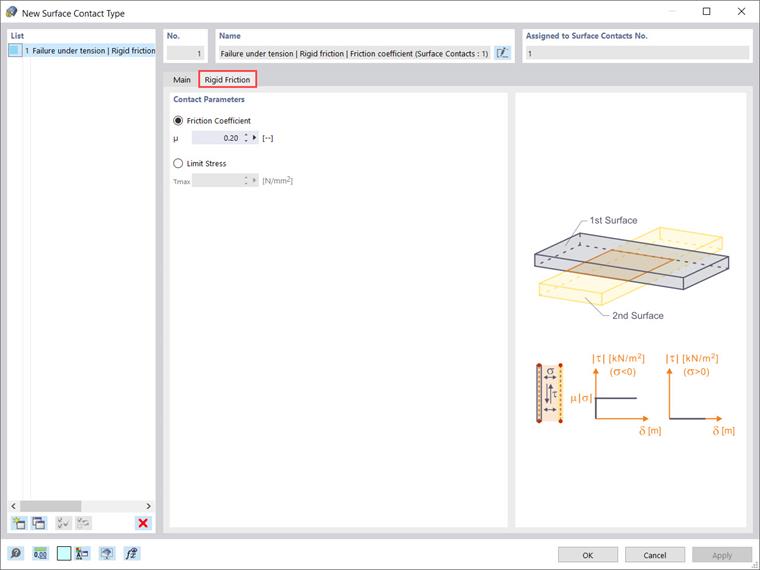
Para completar, mostraremos qué parámetros deben definirse al elegir una de las últimas tres opciones. Así, si selecciona "Fricción rígida" en la lista "Contacto paralelo a las superficies", debe definir el coeficiente de fricción μ o la tensión límite τmax como parámetros de contacto (Imagen 5). El coeficiente de fricción μ está asociado con el ratio de tensiones de corte τ (τ = μ ⋅ |σ|), mientras que τmax es una tensión límite; una vez alcanzada, la tensión no aumenta más al incrementar la deformación, sino que permanece constante.
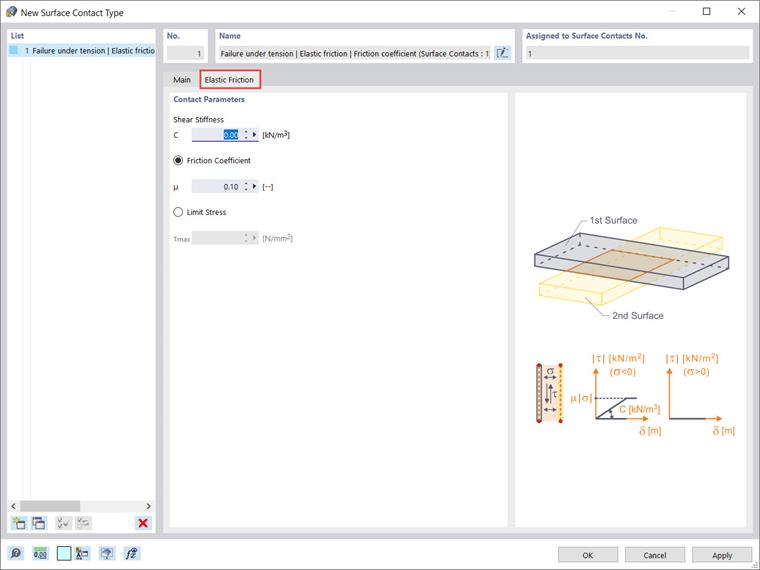
De manera similar, puede seleccionar "Fricción elástica" y definir los parámetros del contacto paralelo a las superficies para el cual la fuerza de corte aumenta proporcionalmente a la deformación (Imagen 6). La entrada es similar a la de la fricción rígida mostrada en la Imagen 5. Dado que se representa un comportamiento elástico, también es necesario especificar la constante de rigidez de corte C, que representa la fuerza requerida para mover un área de 1 m2 por 1 m.
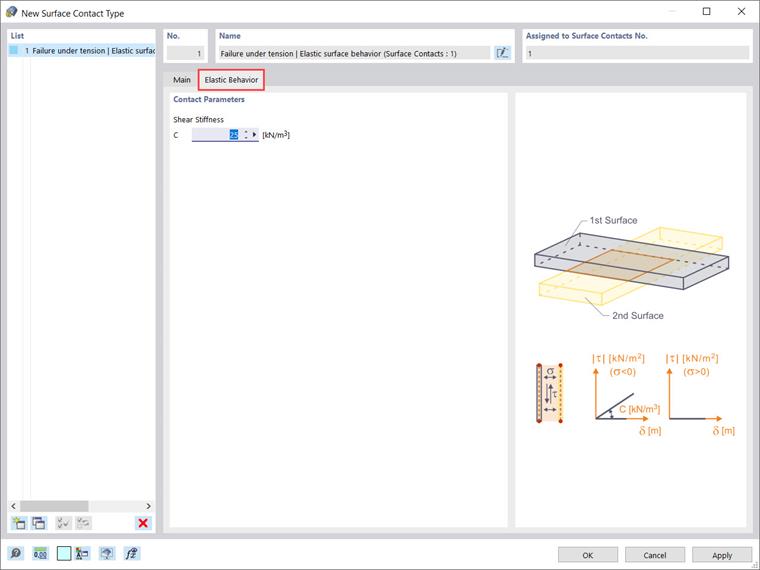
Finalmente, puede elegir un comportamiento superficial elástico y especificar la rigidez de corte C del resorte en la pestaña "Comportamiento elástico" para describir la propiedad de la transferencia elástica de fuerzas de corte (Imagen 7).
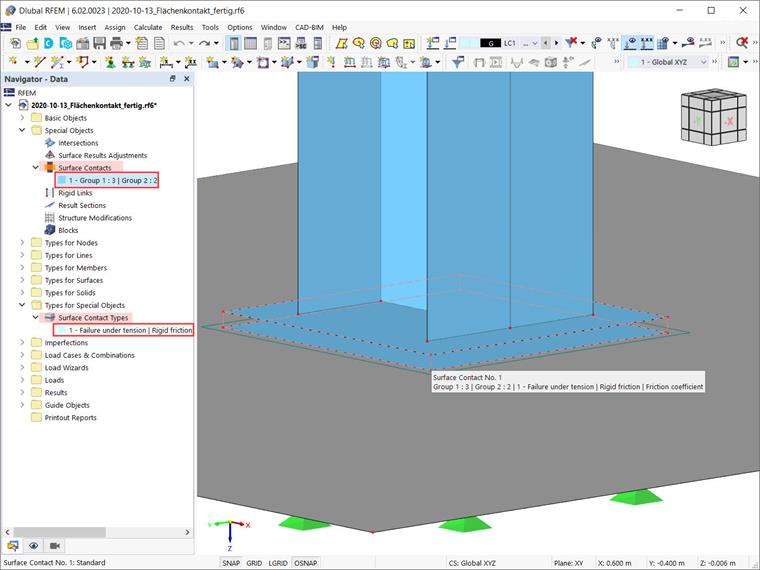
En este ejemplo particular, donde se debe definir el contacto entre la Superficie No. 2 y la Superficie No. 3, se elige "Fallo bajo tracción" para describir el contacto perpendicular a las superficies, y se selecciona "Fricción rígida" para describir el contacto paralelo a las mismas. De esta manera, el contacto de superficie se define y se muestra en la Imagen 8.
Resumen
Un contacto de superficie describe la conexión entre dos o más superficies paralelas. Para definir un contacto de superficie, se deben seleccionar las superficies de interés y definir las propiedades de contacto. Las propiedades de contacto se definen mediante la definición de un tipo de contacto de superficie que, de hecho, controla la transferencia de fuerzas entre las superficies especificadas. Tanto los contactos de "Superficies de contacto" como los de "Tipo para superficies" pueden definirse a través de las entradas asociadas en el navegador de datos.