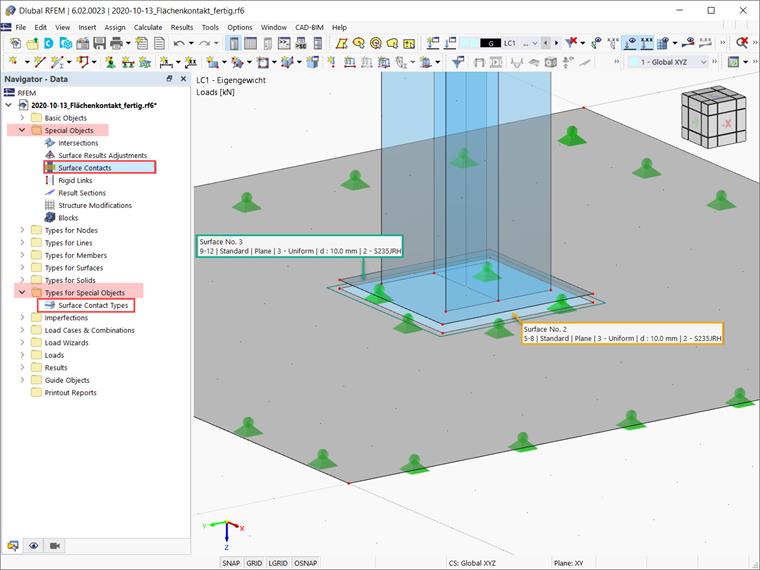
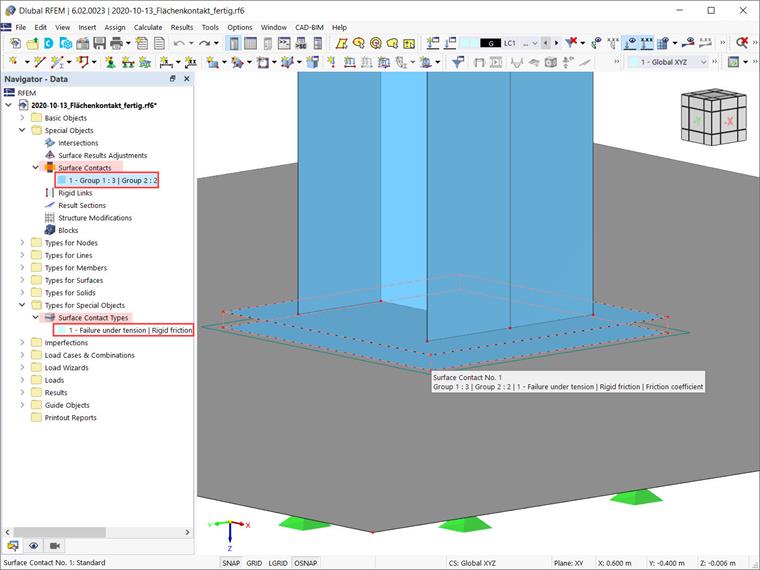
Les contacts entre surfaces et le type de contacts entre surfaces peuvent être définis via les entrées correspondantes dans le Navigateur - Données. Les premiers sont organisés dans les « Objets spéciaux », les seconds dans les « Types pour les objets spéciaux ». L'exemple de la Figure 1 détaille leur définition en créant une connexion entre la surface n° 2 et la surface n° 3.
La boîte de dialogue « Nouveau contact entre surfaces » est illustrée dans la Figure 2. Comme indiqué, la procédure pour le définir est assez simple. Vous devez d'abord entrer les numéros des surfaces entre lesquelles le contact est créé. Définissez donc l'une des surfaces comme « Groupe 1 » et la surface parallèle comme « Groupe 2 ».
Vous pouvez également cliquez sur « Sélectionner individuellement » pour sélectionner graphiquement les surfaces. Notez que chaque groupe peut également être composé de plusieurs surfaces. Ces groupes de surfaces ne doivent pas nécessairement se trouver exactement les uns au-dessus des autres et ils ne doivent pas se trouver dans le même plan.
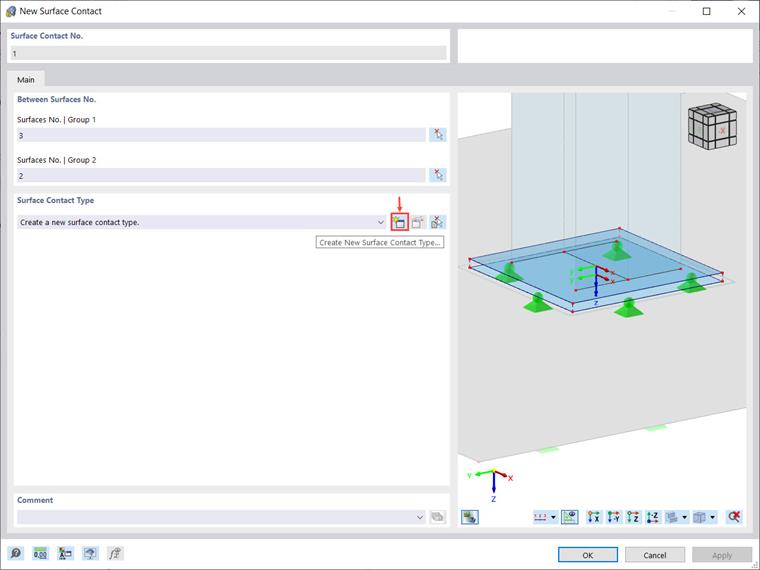
Une fois les surfaces souhaitées sélectionnées, assignez le type de contact entre surfaces. S'il en existe déjà un, vous pouvez le sélectionner dans la liste. Sinon, vous pouvez en définir un nouveau en ouvrant la boîte de dialogue associée via l’icône « Créer un nouveau type de contact entre surfaces » (Figure 2). La boîte de dialogue permettant de définir un nouveau type de contact surfacique est également accessible via l’entrée « Type de contact entre surfaces » dans le Navigateur - Données (voir la Figure 1).
Par conséquent, vous pouvez définir le type de contact lors de la définition du contact lui-même (comme dans la Figure 2), ou vous pouvez le faire à l'avance, puis le sélectionner dans la liste de la boîte de dialogue « Nouveau contact entre surfaces ». Cette dernière approche est présentée dans la vidéo associée à cet article.
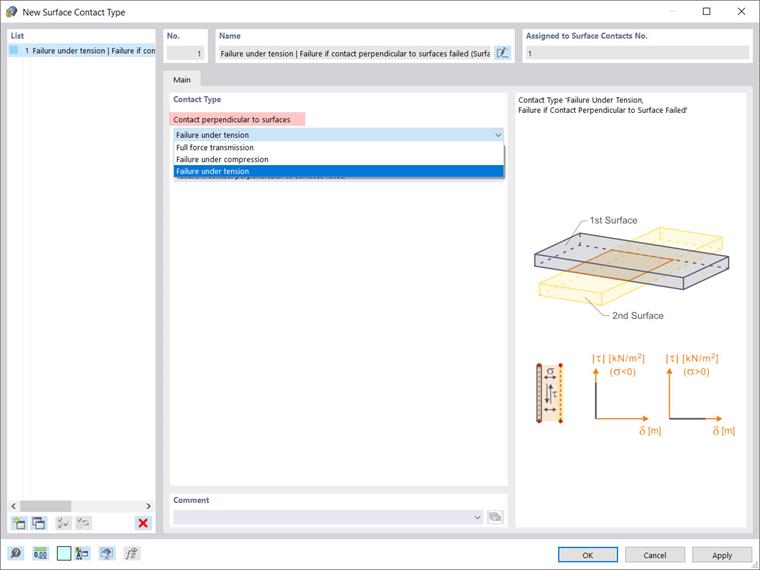
Les deux approches conduisent à la définition des types de contact entre surfaces comme le montre la Figure 3. Étant donné que le type de contact entre surfaces contrôle les efforts transférés entre les surfaces, vous devez d’abord définir les propriétés de contact perpendiculairement et parallèlement aux surfaces.
Dans la liste « Contact perpendiculaire aux surfaces », vous pouvez sélectionner l’une des trois options suivantes : transmission complète de l’effort (c’est-à-dire transfert des efforts de traction et de compression entre les surfaces), échec en traction (c’est-à-dire que le contact est libéré dès que les surfaces s'éloignent l’une de l'autre) et échec en compression (c’est-à-dire seuls les efforts de traction sont transférés entre les surfaces).
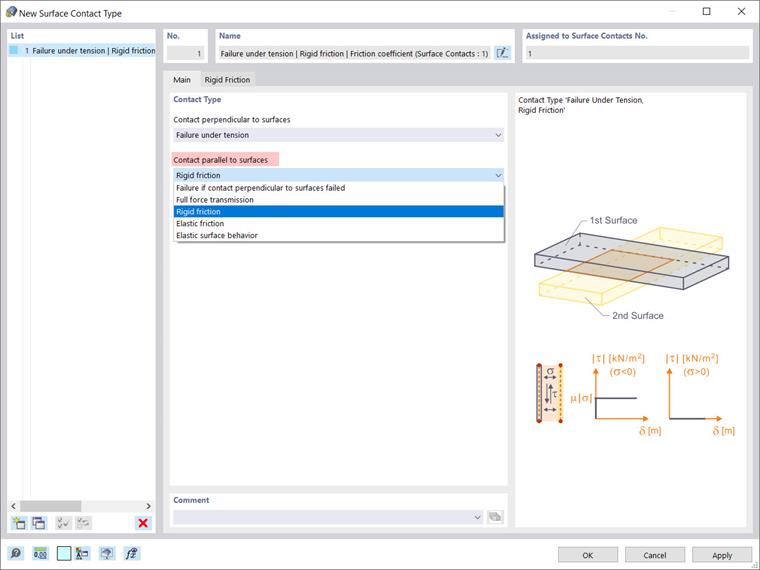
La liste « Contact parallèle aux surfaces » propose quant à elle cinq options permettant de décrire la manière dont les efforts tranchants sont transférés entre les surfaces (Figure 4). Vous pouvez définir, par exemple, qu’aucun effort tranchant ne soit transféré s’il n'y a pas de contact de traction ou de compression entre les surfaces en sélectionnant « Rupture si le contact perpendiculaire aux surfaces est en échec ».
Vous pouvez également sélectionner « Transmission complète de l’effort » et tous les efforts tranchants seront transférés, que le contact soit efficace ou non perpendiculairement aux surfaces. Les trois autres options à votre disposition sont les suivantes : friction rigide, friction élastique et comportement de surface élastique.
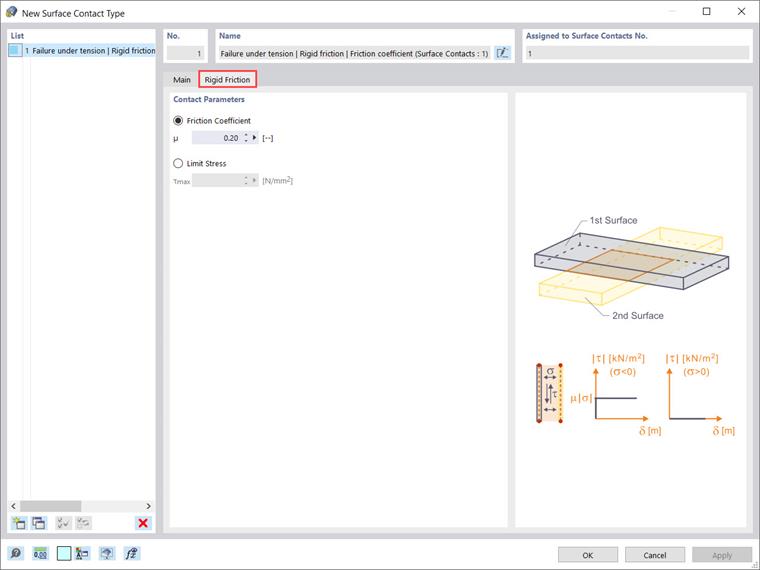
Par souci d'exhaustivité, nous montrons quels paramètres doivent être définis lors du choix de l'une des trois dernières options. Ainsi, si vous sélectionnez « Friction rigide » dans la liste « Contact parallèle aux surfaces », vous devez définir le coefficient de friction μ ou la contrainte limite τmax comme paramètres de contact (Figure 5). Le coefficient de friction μ est associé au ratio des contraintes de cisaillement τ (τ = μ ⋅ |σ|), tandis que τmax est une contrainte limite ; une fois atteinte, la contrainte n'augmente pas davantage avec la déformation, mais reste constante.
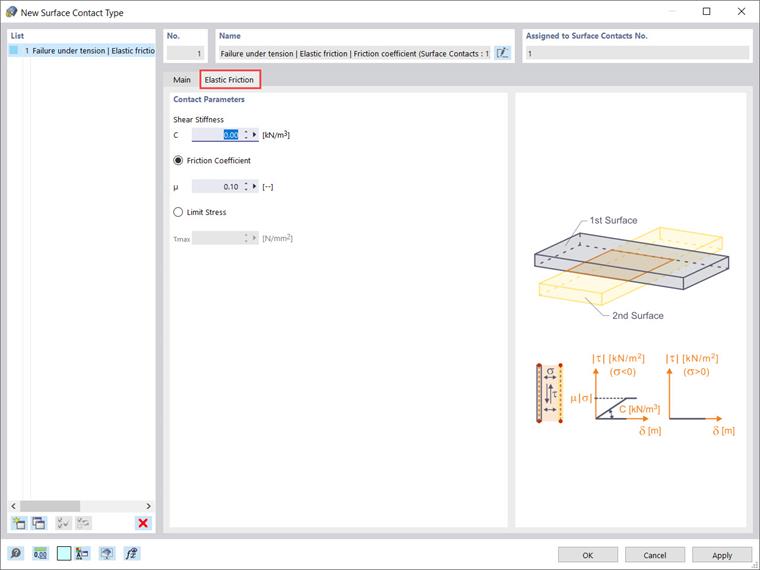
De la même manière, vous pouvez sélectionner « Friction élastique » et définir les paramètres du contact parallèle aux surfaces pour lesquelles l'effort tranchant augmente proportionnellement à la déformation (Figure 6). L'entrée est similaire à celle de la friction rigide montrée dans la Figure 5. Comme un comportement élastique est représenté, il est également nécessaire de spécifier la constante de rigidité en cisaillement C, qui représente la force requise pour déplacer une surface de 1 m2 sur 1 m.
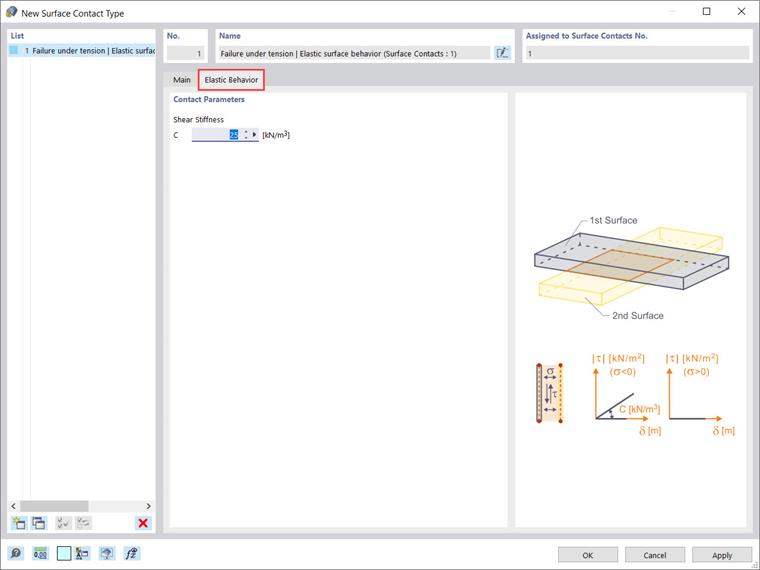
Enfin, vous pouvez choisir un comportement de surface élastique et spécifier la rigidité en cisaillement C du ressort dans l’onglet « Comportement élastique » afin de décrire la propriété de transfert élastique des efforts tranchants (Figure 7).
Dans cet exemple particulier, où le contact entre la surface n° 2 et la surface n° 3 doit être défini, « Échec en traction » est sélectionné pour décrire le contact perpendiculaire aux surfaces et « Friction rigide » est sélectionné pour décrire le contact parallèle. Le contact entre surfaces est ainsi défini et représenté sur la Figure 8.
Résumé
Un contact entre surfaces décrit la connexion entre deux ou plusieurs surfaces parallèles. Pour définir un contact entre surfaces, les surfaces d'intérêt doivent être sélectionnées et les propriétés de contact doivent être définies. Les propriétés de contact sont définies en définissant un type de contact entre surfaces qui, en fait, contrôle le transfert des forces entre les surfaces spécifiées. Les contacts « Contacts de surface » et « Type de surface » peuvent être définis via les entrées associées dans le Navigateur - Données.