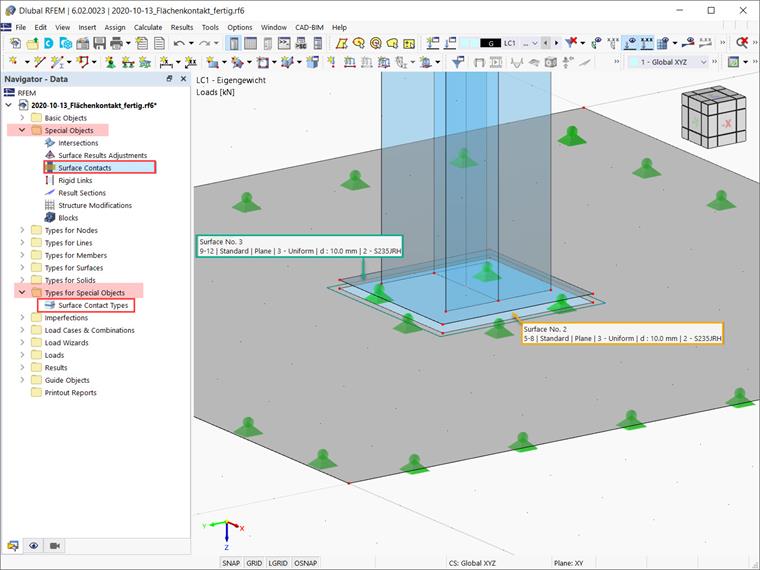
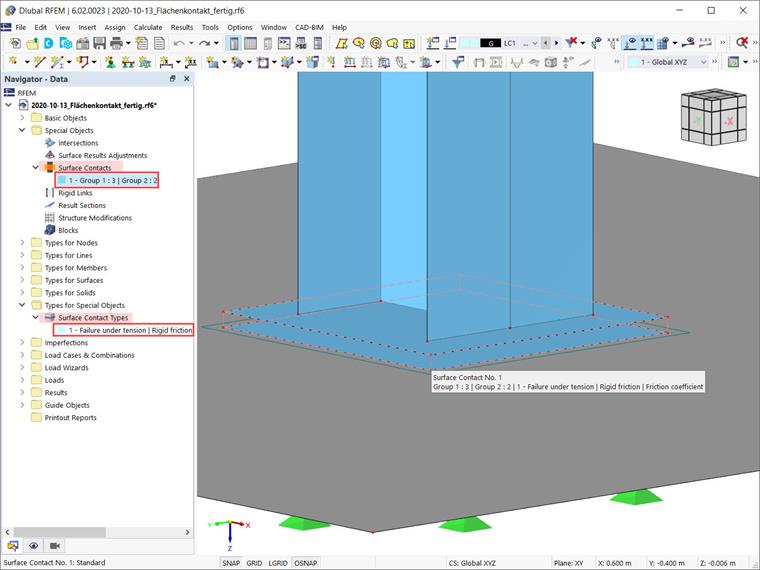
Zarówno kontakty powierzchni, jak i typy kontaktów powierzchni mogą być zdefiniowane za pomocą odpowiednich wpisów w nawigatorze danych. Pierwsze z nich są zorganizowane w „Specjalnych Obiektach”, a drugie w „Typach dla Specjalnych Obiektów”. Więcej na temat ich definicji zostanie pokazane w przykładzie na rysunku 1 przez utworzenie połączenia między Powierzchnią Nr 2 a Powierzchnią Nr 3.
Pole dialogowe „Nowy Kontakt Powierzchniowy” jest pokazane na rysunku 2. Jak pokazano, procedura definiowania go jest dosyć prosta. Najpierw należy wprowadzić numery powierzchni, pomiędzy którymi tworzony jest kontakt. Dlatego jedną z powierzchni należy zdefiniować jako „Grupa 1”, a równoległą powierzchnię jako „Grupa 2”.
Można również użyć przycisku „Wybierz Indywidualnie”, aby graficznie wybrać powierzchnie. Należy pamiętać, że każda grupa może składać się także z kilku powierzchni. Te grupy powierzchni nie muszą leżeć dokładnie jedna nad drugą i nie mogą leżeć w tej samej płaszczyźnie.
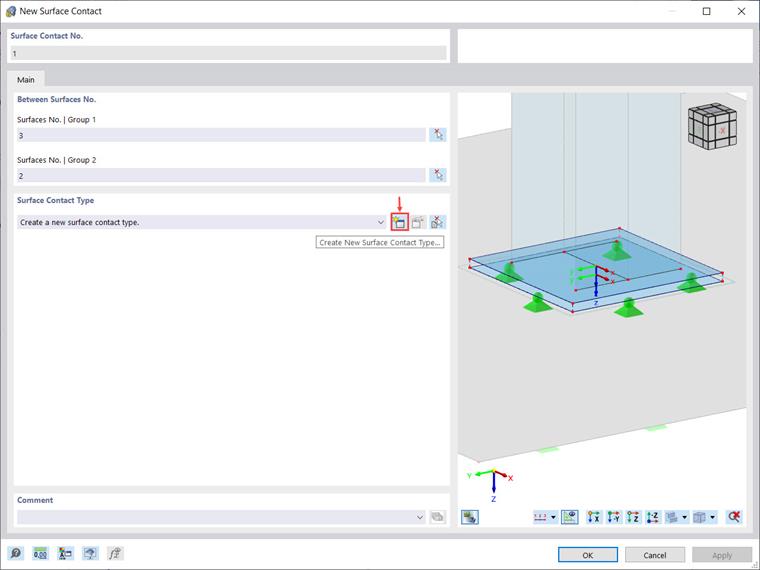
Po wybraniu interesujących powierzchni, należy przypisać typ kontaktu powierzchniowego. Jeśli taki już istnieje, można go wybrać z listy. W przeciwnym razie można zdefiniować nowy otwierając odpowiednie pole dialogowe za pomocą ikony „Utwórz Nowy Typ Kontaktu Powierzchniowego” (Rysunek 2). Pole dialogowe do definiowania nowego typu kontaktu powierzchniowego jest również dostępne poprzez wpis „Typ Kontaktu Powierzchniowego” w nawigatorze danych (pokazany na rysunku 1).
Dlatego można zdefiniować typ kontaktu podczas definicji samego kontaktu (jak na rysunku 2), lub można to zrobić wcześniej, a następnie wybrać go z listy w polu dialogowym „Nowy Kontakt Powierzchniowy”. Drugie podejście zostało pokazane na filmie w tym artykule Bazy Wiedzy.
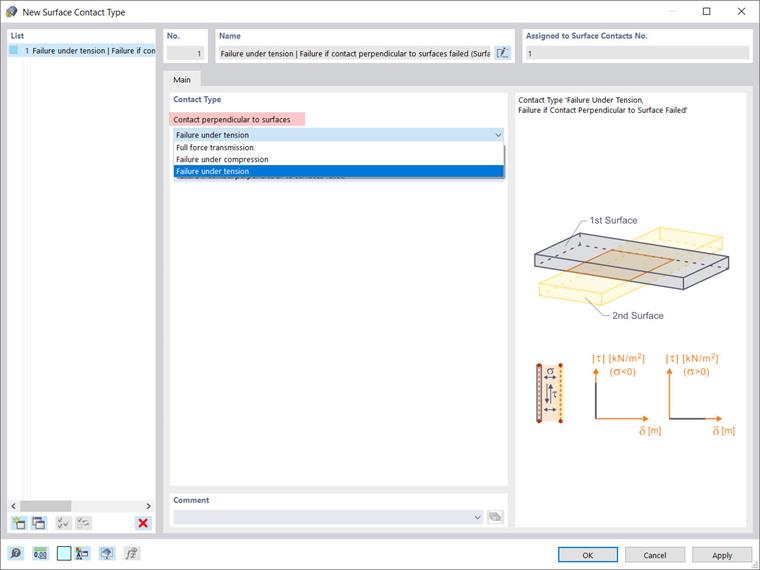
Oba podejścia prowadzą do definicji typów powierzchni kontaktowych, jak pokazano na rysunku 3. Biorąc pod uwagę, że typ kontaktu powierzchniowego kontroluje siły przekazywane między powierzchniami, konieczne jest najpierw ustawienie właściwości kontaktu prostopadle i równolegle do powierzchni.
W liście „Kontakt prostopadły do powierzchni” można wybrać jedną z następujących trzech opcji: pełne przenoszenie sił (czyli przenoszenie zarówno sił rozciągających, jak i ściskających między powierzchniami); niepowodzenie pod naprężeniem rozciągającym (czyli kontakt jest zwalniany, gdy powierzchnie oddalają się od siebie); oraz niepowodzenie pod naprężeniem ściskającym (czyli przenoszone są tylko siły rozciągające między powierzchniami).
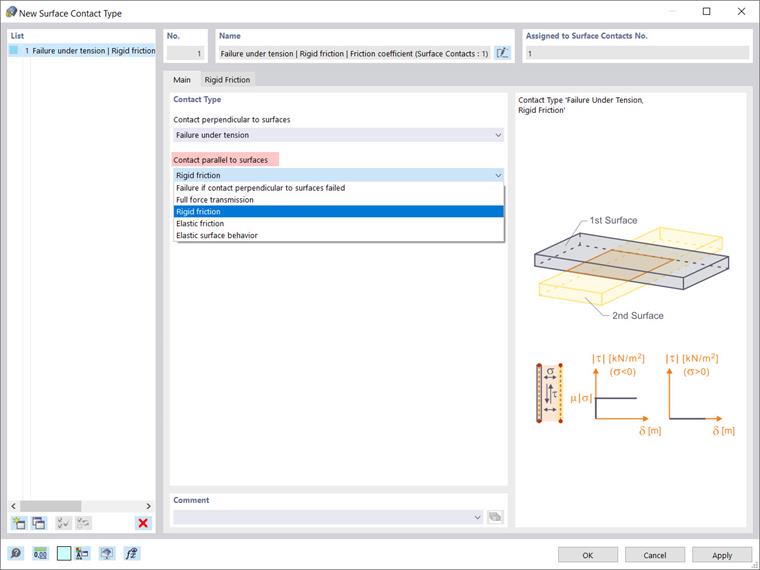
W przypadku listy „Kontakt równoległy do powierzchni” jest pięć opcji, które pomagają opisać, jak siły ścinające są przenoszone między powierzchniami (Rysunek 4). Można zdefiniować na przykład, aby siły ścinające nie były przenoszone, jeśli nie ma kontaktu napięciowego lub ściskającego między powierzchniami, wybierając opcję „Niepowodzenie, jeśli kontakt prostopadły do powierzchni zawiódł”.
Można także wybrać opcję „Pełne przenoszenie sił” i wszystkie siły ścinające będą przenoszone, niezależnie od tego, czy kontakt jest skuteczny prostopadle do powierzchni. Trzy pozostałe opcje do dyspozycji to: sztywne tarcie, elastyczne tarcie i elastyczne zachowanie powierzchniowe.
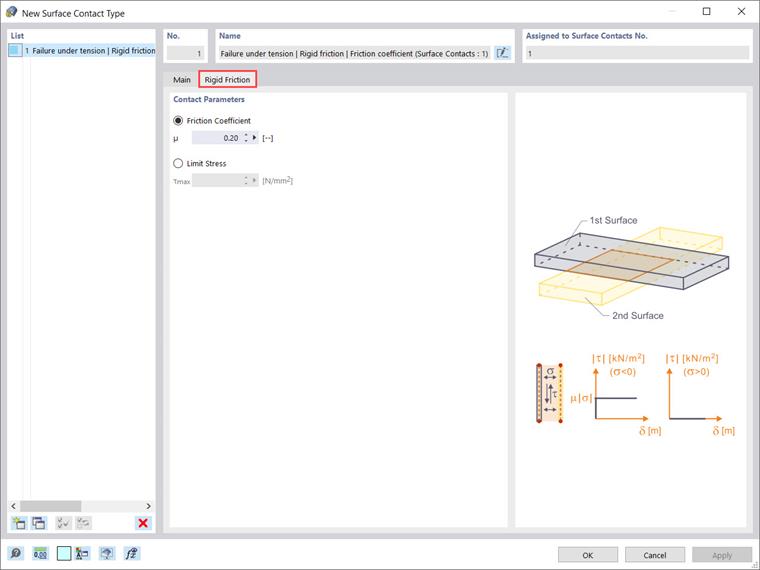
Dla pełności, pokażemy, jakie parametry należy zdefiniować, wybierając jedną z ostatnich trzech opcji. Zatem, jeśli wybierzesz „Sztywne tarcie” w liście „Kontakt równoległy do powierzchni”, musisz zdefiniować współczynnik tarcia μ lub graniczne naprężenie τmax jako parametry kontaktu (Rysunek 5). Współczynnik tarcia μ jest związany z proporcją naprężeń ścinających τ (τ = μ ⋅ |σ|), natomiast τmax jest naprężeniem granicznym; gdy zostanie ono osiągnięte, naprężenie nie jest dalej zwiększane przez zwiększoną deformację, ale pozostaje stałe.
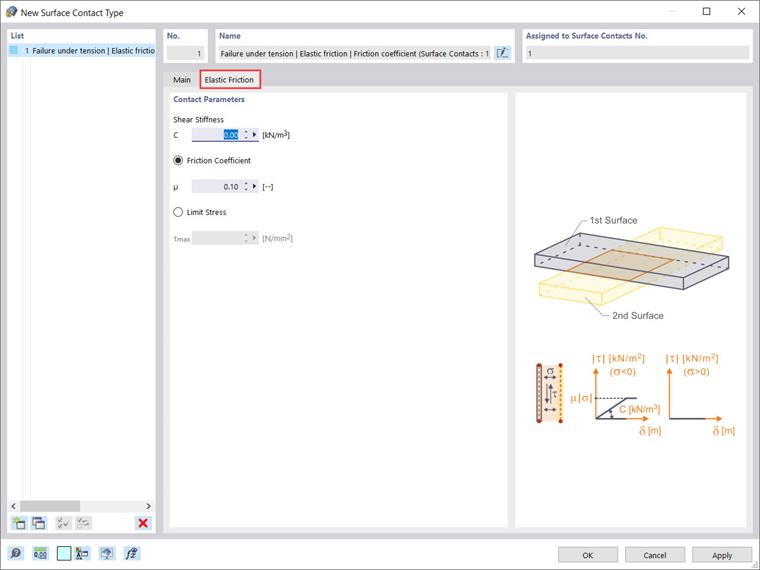
W podobny sposób można wybrać „Elastyczne tarcie” i zdefiniować parametry kontaktu równoległego do powierzchni, przy którym siła ścinająca rośnie proporcjonalnie do deformacji (Rysunek 6). Wpis jest podobny do tego dla sztywnego tarcia pokazanego na rysunku 5. Ponieważ reprezentowane jest zachowanie elastyczne, konieczne jest również podanie stałej sztywności ścinającej C, która reprezentuje siłę wymaganą do przemieszczenia obszaru 1 m2 o 1 m.
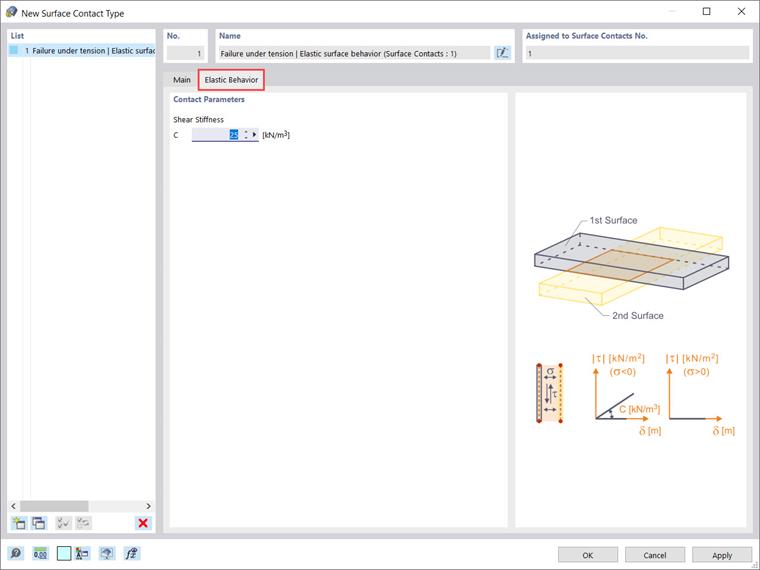
Na koniec można wybrać elastyczne zachowanie powierzchniowe i określić sztywność ścinającą C sprężyny w zakładce „Zachowanie Elastyczne”, aby opisać właściwości elastycznego transferu sił ścinających (Rysunek 7).
W tym szczególnym przykładzie, gdzie kontakt między Powierzchnią Nr 2 a Powierzchnią Nr 3 ma zostać zdefiniowany, wybrano „Niepowodzenie pod naprężeniem rozciągającym”, aby opisać kontakt prostopadle do powierzchni, i „Sztywne tarcie”, aby opisać kontakt równolegle do nich. W ten sposób kontakt powierzchniowy jest zdefiniowany i pokazany na Rysunku 8.
Podsumowanie
Kontakt powierzchniowy opisuje połączenie między dwiema lub więcej równoległymi powierzchniami. Aby zdefiniować kontakt powierzchniowy, należy wybrać odpowiednie powierzchnie i zdefiniować właściwości kontaktu. Właściwości kontaktu są definiowane poprzez zdefiniowanie typu kontaktu powierzchniowego, który w rzeczywistości kontroluje transfer sił między określonymi powierzchniami. Zarówno „Kontakty Powierzchniowe”, jak i „Typy dla Powierzchni” mogą być zdefiniowane za pomocą odpowiednich wpisów w nawigatorze danych.