






起源
超过2500年前,建筑施工中已经使用了起重机等机械辅助器械。随着时间的推移,这些机械不断得到改进。为了在没有马达的情况下移动重物,当时采用了杠杆定律和通过多根绳索和滑轮的力增大。这些简单却又巧妙的基本原理至今仍在应用。
什么是倍增滑轮组?
倍增滑轮组是由一根绳子和至少一个滑轮组成的混合结构,用于提升重物。通过使用多个滑轮,可以不断减少提升重量所需的力。其中部分滑轮是固定的,其他则是随提升动作移动的所谓的活动滑轮。力的增大优势需要通过增加的拉动距离来弥补。
四种典型的滑轮组
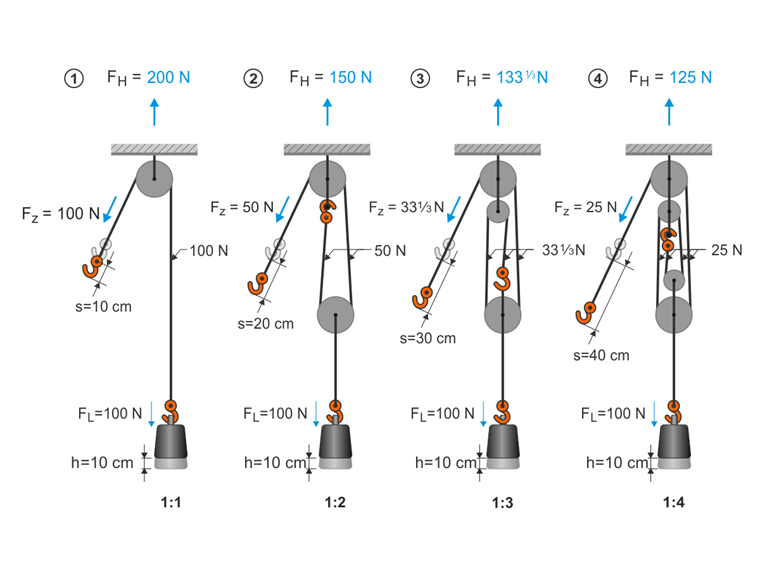
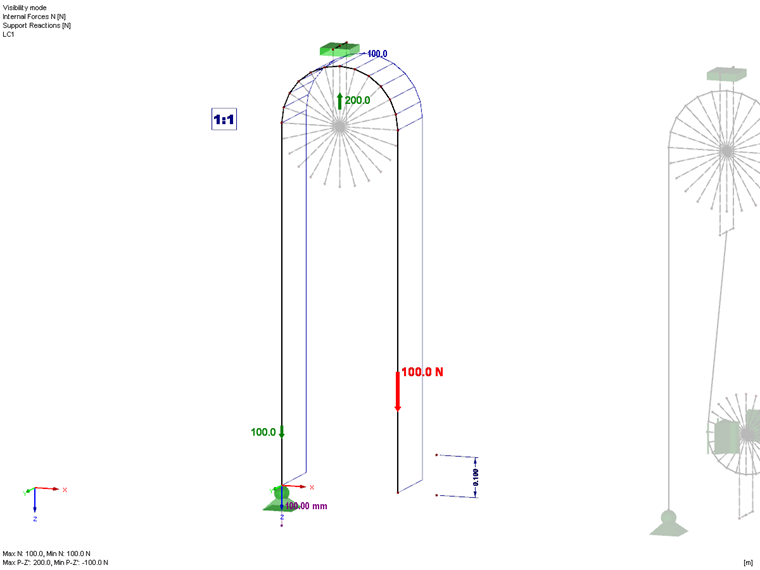
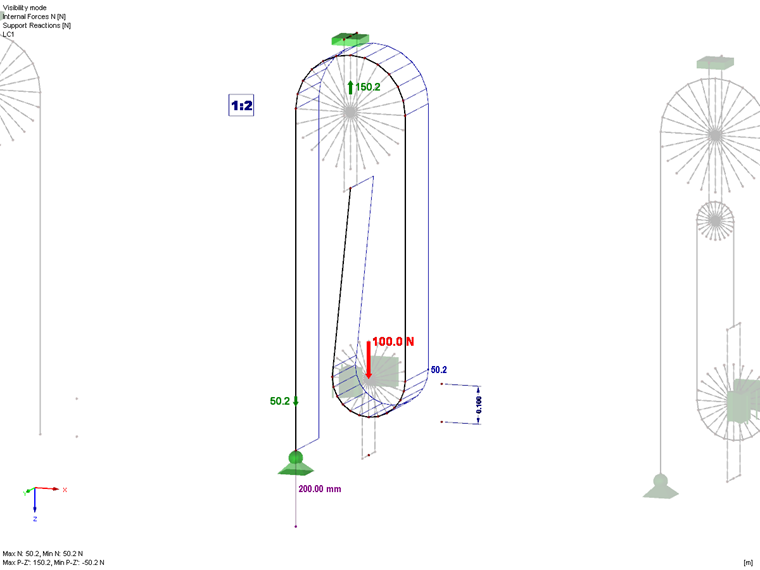
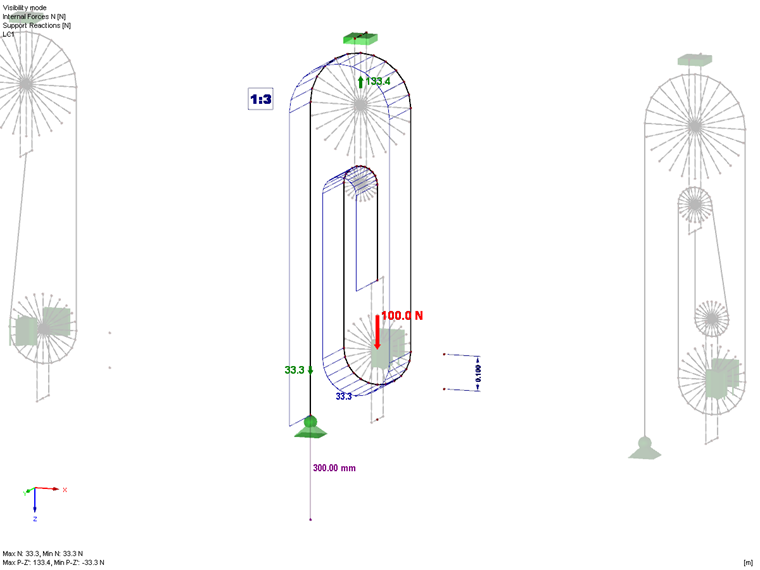
接下来我们将介绍四种下拉力滑轮组的变体。在附加的文件中,首先进行了尽可能现实的结构设计,其次是一个简单的示意性建模,以便更好地理解其行为。
在每个变体中,此例中的任务都是将重G = 100 N提升到u = 100 mm的高度。在其中:
| F | 提升重量所需的力,在RFEM模型中对应于左下部支座 |
| n | 承载绳索段的数量 |
| Δl | 将重量提升u所需的拉动距离 |
对于这类滑轮组,所需的拉动距离计算公式为Δl = n · u。
实现比例 1 : 1 F = G Δl = u
实现比例 1 : 2 F = 0.5 · G Δl = 2 · u
实现比例 1 : 3 F = 1/3 · G Δl = 3 · u
实现比例 1 : 4 F = 1/4 · G Δl = 4 · u
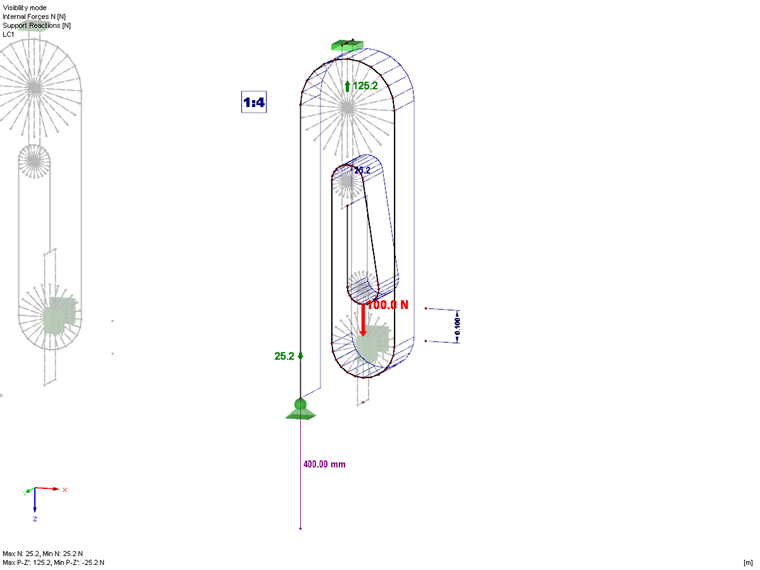
RFEM中的建模
在建模时,需要将绳索输入为具有至少三个节点的连续折线。这样程序“知道”它是一个整体绳索的元素。随后可以将折线赋予“滑轮上的绳索”这个杆件类型。在绳索杆的至少一端必须有一个固定的支座或杆件,以便传递施加的拉力。由于在“滑轮上的绳索”中拉力应保持恒定,因此连接的元素不需要进一步的定义。如果绳索在邻接元素或节点评力处出现弯曲,拐弯力将传递到相应处。
在建模过程中,刚性杆件被设计为能够在一个支座上读取楼板力。在活动滑轮处设置了额外的稳定支座,以防止不稳定情况。
所需的拉动距离是通过节点强制变形施加的。