






介绍
每当力学问题无法通过解析方法解决时,就可以使用有限元法。 通常,例如受压失效(几何非线性)、塑性屈服(材料非线性)以及接触或运动自由度等非线性影响也会被考虑。 可以通过使用迭代计算方法来考虑这些影响,特别是对于非线性材料模型。
有限元模型设置
设置有限元模型的基本步骤(更多信息请参见[1]):
- 弱平衡形式
δu
Virtuelle (Test-)Verschiebung
t0
Anfangslastfaktor
σdV
Innere Kräfte
ρbdV
Volumenkräfte
B
integriertes Gebiet
- 将张量 4 转换为 Foigt 表示法 踏步
C
Steifigkeitsmatrix
δε
Variation des Verzerrungszustands
B
integriertes Gebiet
ε
Dehnung
u
Verformung
- 在下文中使用这个符号来求解非线性材料的有限元方法的近似解。
- 为此,位移场乘以逼近函数。
将位移导数插入弱形式中。 数值积分可用于计算节点位移、应力,以及在后期处理中按照材料组合的规定进行计算。
Newton-Raphson 迭代顺序
由于材料是非线性的,公式 2 中的材料矩阵 C 会随着每个扩展步的变化而变化。 求解此问题的标准计算方法是 Newton-Raphson 迭代。 用于使函数在起点处线性化。 迭代中始终使用初始步的刚度矩阵 C。 在线性迭代步骤中,在函数的零点处放置切线。
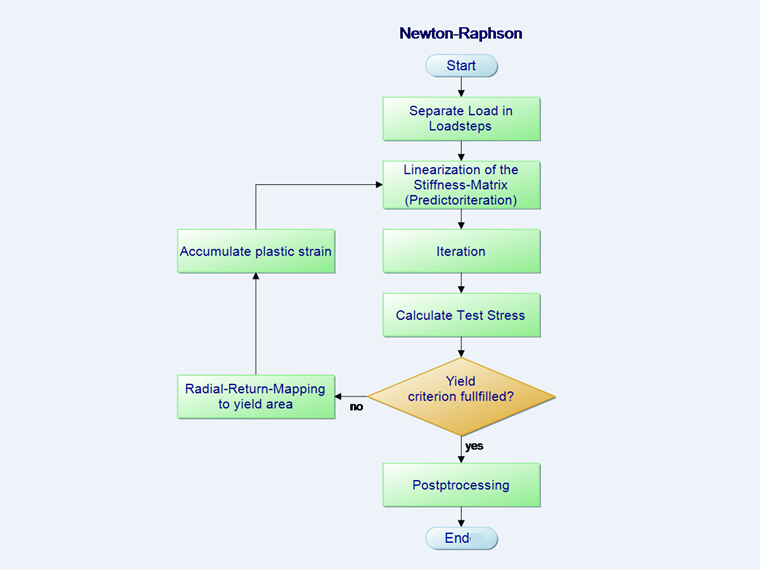
上图中的流程图中的公式如下:
- 将荷载划分为多个荷载步。
- 预测步长
K
Steifigkeitsmatrix des vorherigen Zeitschritts
t+Δtfext
Äußere Kräfte um eine weitere Laststufe erhöht
0tfint
Innere Kräfte des vorherigen Zeitschritts
ϕ
Verzerrung
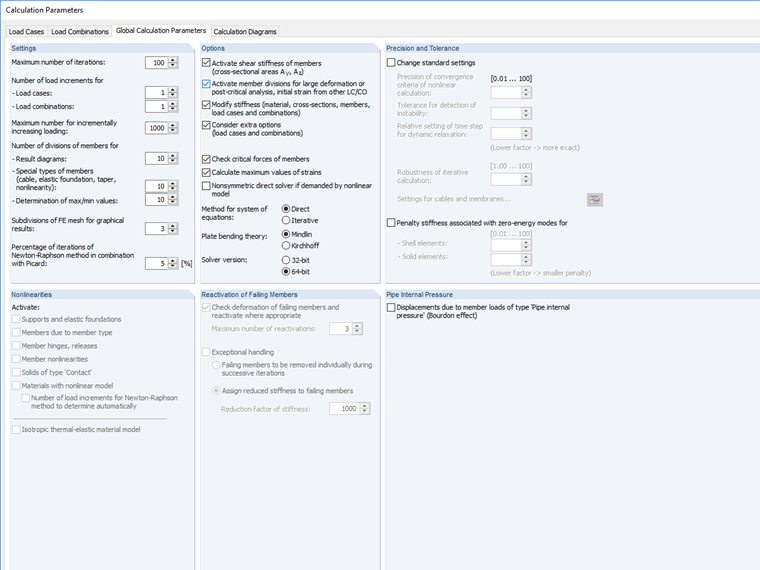
- 在第 3 点,流程图的迭代中,计算总变形减去塑性变形后的结果(修正步骤)。 迭代计算的目标是使荷载之和始终为零。 但这在数值上是不可能的。 因此,定义了一个中断极限 ε,在该极限数目时计算由于足够精度而中断。
在程序中,可以设置折断极限值的计算参数。
下图显示了Newton-Raphson迭代的流程。 在第一次迭代中
未达到断裂点 R 或 ε。 在第二次迭代中也未达到公差极限(红色)。 只有在第三次迭代中,切线刚度的距离小到可以收敛。
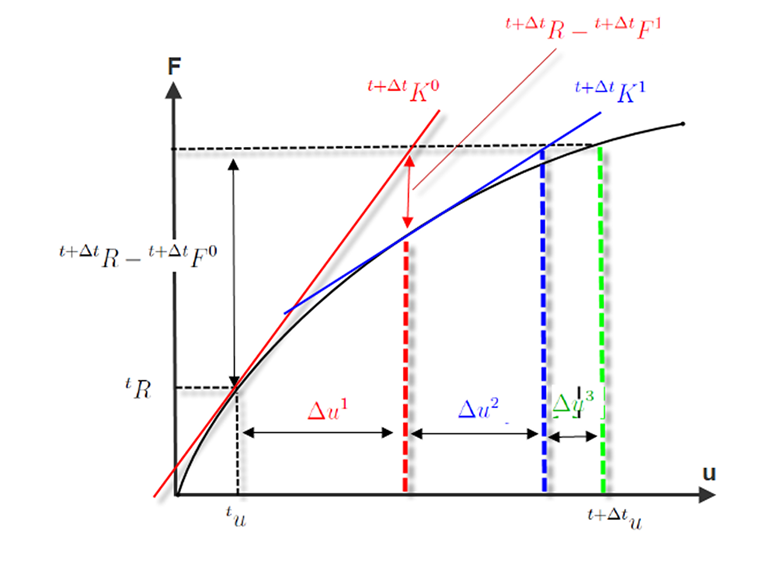
如前所述,在迭代过程中变形会被连续叠加。
概述总结
Newton-Raphson 迭代的一致性或收敛阶数为 2。 迭代中“正确”位置的数量每增加一倍。 Newton-Raphson 迭代以二次函数的方式收敛,随着迭代的进行,当方法收敛时,精度提高。 如果该方法不收敛,则误差无穷大,计算停止。
例如,荷载-变形曲线的斜率太陡以及塑性区域中的曲线斜率太平, 如果上图中的荷载-变形曲线在第二次迭代步中出现突变,那么材料切线以及刚度矩阵将无法正确显示弹性区域的斜率。 在这种情况下,根部的倾角对于塑性区域是错误的。 这就是为什么随着荷载步的增加收敛会越来越快的原因。
