






Úvod
Pokud nelze mechanické úlohy řešit analyticky, uplatňuje se metoda konečných prvků. Přitom se často berou v úvahu také nelineární účinky jako neúčinnost v tlaku (geometrická nelinearita), plastifikace (materiálová nelinearita) a kontaktní, respektive kinematické stupně volnosti. Tyto účinky, zejména v případě nelineárních materiálových modelů, lze zohlednit iterační metodou výpočtu.
Formulace MKP
Základní kroky pro nastavení MKP (další informace najdete v [1]):
- Slabá formulace rovnováhy
δu
Virtuelle (Test-)Verschiebung
t0
Anfangslastfaktor
σdV
Innere Kräfte
ρbdV
Volumenkräfte
B
integriertes Gebiet
- Převod na Voigtův zápis tenzoru čtvrtého Krok
C
Steifigkeitsmatrix
δε
Variation des Verzerrungszustands
B
integriertes Gebiet
ε
Dehnung
u
Verformung
- Z tohoto zápisu dále vychází aproximační řešení MKP u nelineárních materiálů.
- Pole posuvů se přitom násobí tvarovými funkcemi.
u(x,t)
Verschiebung über Zeit (Lastinkrement)
H
Formfunktion
û
Knotenverschiebung
Použití derivace posunutí ve slabé formulaci. Numerickou integrací se stanoví posunutí uzlů a v post processingu napětí a přetvoření na základě materiálového modelu.
Průběh Newton-Raphsonovy iterace
Vlivem nelineárního chování materiálu se materiálová matice C ve výše uvedené rovnici 2 mění s každým krokem přetvoření. Standardní metodou řešení tohoto problému je takzvaná Newton-Raphsonova iterace. Při ní se funkce ve výchozím bodě linearizuje. Při iteraci se vždy používá matice tuhosti C předchozího kroku. V linearizovaném iteračním kroku je tečna vedena k nulovému bodu funkce.
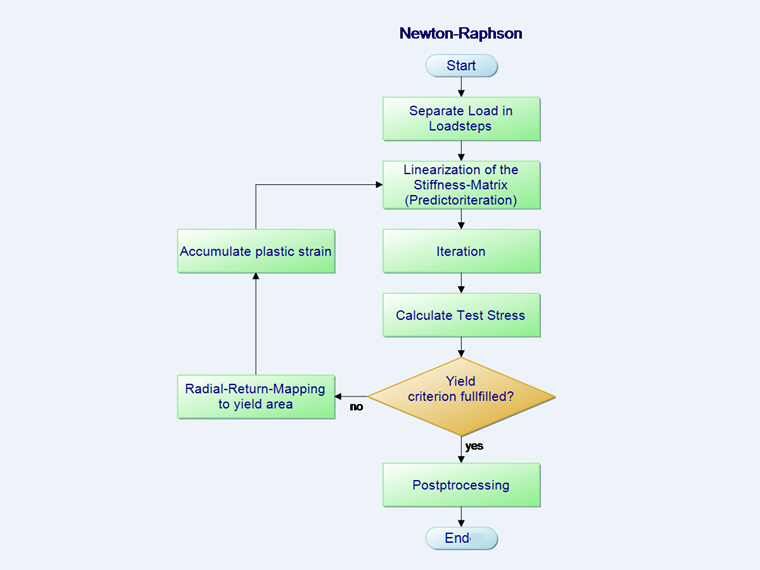
Ke schématu průběhu iterace na obrázku výše patří následující rovnice:
- Rozložení zatížení do zatěžovacích kroků
- Krok predikce
K
Steifigkeitsmatrix des vorherigen Zeitschritts
t+Δtfext
Äußere Kräfte um eine weitere Laststufe erhöht
0tfint
Innere Kräfte des vorherigen Zeitschritts
ϕ
Verzerrung
- V bodě 3 Iterace vývojového diagramu se vypočítá celkové přetvoření po odečtení plastického přetvoření (krok korekce). Cílem iteračního výpočtu vždy je, aby součet zatížení byl nulový. To ovšem numericky není možné. Proto se definuje mez pro přerušení ε, při které se výpočet přeruší jako dostatečně přesný.
R
Abbruchrate
fext
äußere Kräfte
fint
innere Kräfte
ε
Epsilon Abbruchrate
t
Zeitschritt
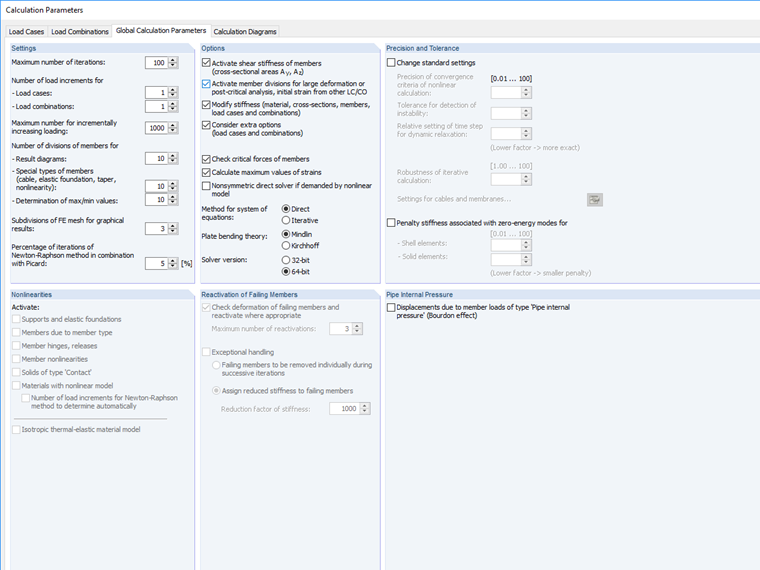
V programu lze mez pro přerušení nastavit v parametrech výpočtu.
Na následujícím obrázku je znázorněn průběh Newton-Raphsonovy iterace. V první iteraci
není dosažena mez pro přerušení R, respektive ε. Ani v druhé iteraci (červeně) není dosažena mez tolerance. Až ve třetí iteraci je vzdálenost tečné tuhosti tak malá, že je dosažena konvergence.
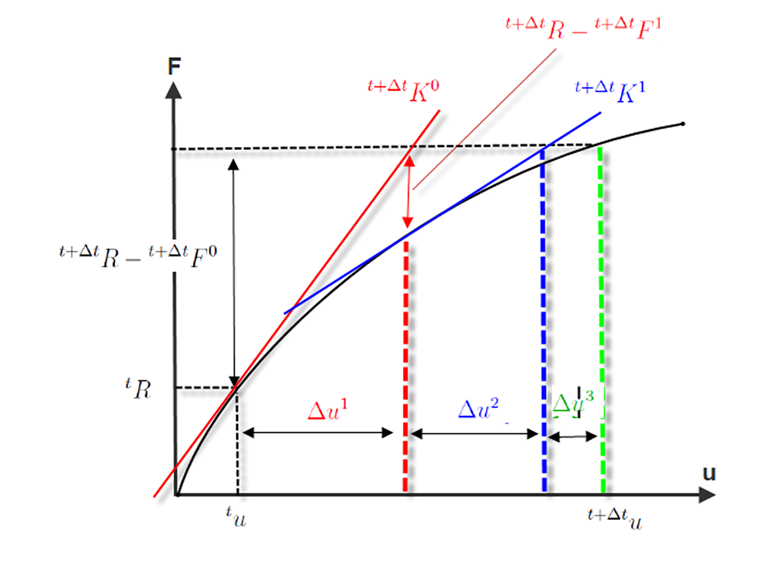
Jak jsme již zmínili, deformace se během iterace průběžně sčítají.
Závěr a výhled
Newton-Raphsonova iterace je metoda druhého řádu konzistence, respektive konvergence. Počet „správných“ míst iterace se s každým krokem zdvojnásobuje. Newton-Raphsonova iterační metoda tak konverguje kvadraticky a přesnost je s každou iterací vyšší, pokud dochází ke konvergenci. Pokud však metoda nekonverguje, chyba jde do nekonečna a výpočet se přeruší.
Příčinou chyby bývá například příliš strmý sklon křivky závislosti deformace na zatížení a příliš mírný sklon křivky v plastické oblasti. Pokud by křivka závislosti deformace na zatížení na výše uvedeném obrázku vykazovala v druhém iteračním kroku příliš velký vzpěr, tečna materiálu, a tudíž matice tuhosti by neznázorňovala správně stoupání pružné oblasti. Stoupání u nulového místa by bylo v tomto případě pro plastickou oblast nesprávné. To je jeden z důvodů, proč vyšší počet zatěžovacích kroků doprovází lepší konvergence.
