






Wstęp
Metoda elementów skończonych jest każdorazowo stosowana w przypadkach, gdy problemów mechanicznych nie sposób rozwiązać analitycznie. Często w modelu uwzględniane są również efekty nieliniowe, takie jak uszkodzenie pod wpływem docisku (nieliniowość geometryczna), uplastycznienie (nieliniowość materiału) oraz zagadnienie kontaktu lub kinematyczne stopnie swobody. Wpływy te, zwłaszcza w przypadku nieliniowych modeli materiałowych, można uwzględnić przy użyciu iteracyjnej metody obliczeń.
Formulacja MES
Podstawowe kroki dla ustawiania MES (dalsze informacje można znaleźć w [1]):
- Słaba postać równań równowagi
δu
Virtuelle (Test-)Verschiebung
t0
Anfangslastfaktor
σdV
Innere Kräfte
ρbdV
Volumenkräfte
B
integriertes Gebiet
- Konwersja na notację Voigta z wykorzystaniem tensora 4 Stopień
C
Steifigkeitsmatrix
δε
Variation des Verzerrungszustands
B
integriertes Gebiet
ε
Dehnung
u
Verformung
- Notacja ta jest używana w dalszej części opracowania do przybliżonego rozwiązania równań MES dla materiałów nieliniowych.
- W tym celu pole przemieszczeń pomnożone zostaje przez funkcje podejścia.
u(x,t)
Verschiebung über Zeit (Lastinkrement)
H
Formfunktion
û
Knotenverschiebung
Podstawienie pochodnej przemieszczenia do postaci słabej. Zastosowane jest całkowanie numeryczne do obliczania przemieszczeń węzłowych, a następnie naprężeń i odkształceń w późniejszej fazie obróbki danych za pomocą przyjętego modelu materiałowego.
Sekwencja iteracji Newtona-Raphsona
Ze względu na nieliniowe zachowanie materiału, macierz materiału C w równaniu 2 zmienia się z każdym krokiem. Standardową metodą obliczeniową dla rozwiązania tego problemu jest tak zwana iteracja Newtona-Raphsona. Służy do linearyzacji funkcji w punkcie początkowym. W iteracji zawsze stosowana jest macierz sztywności C kroku wstępnego. W zlinearyzowanym kroku iteracji styczna jest umieszczana w punkcie zerowym funkcji.
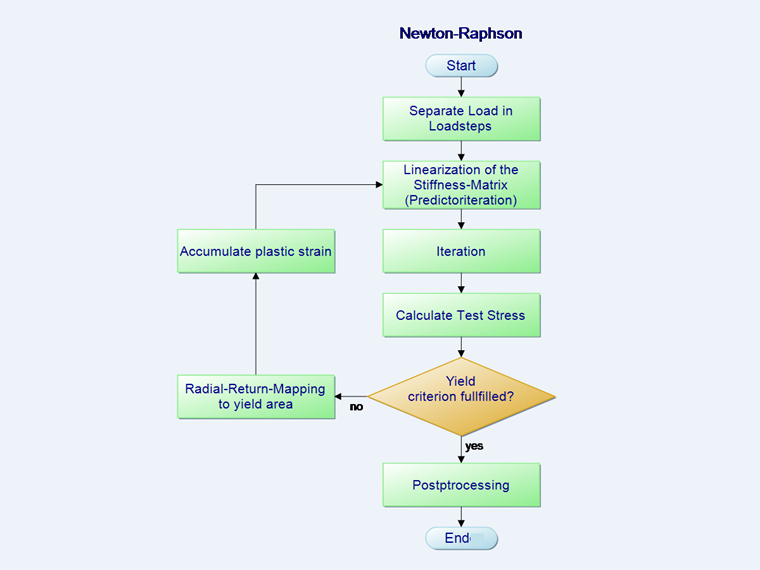
Równania ujęte w schemacie blokowym na powyższym rysunku są następujące:
- Podział obciążenia na kroki obciążenia.
- Krok prognostyczny
K
Steifigkeitsmatrix des vorherigen Zeitschritts
t+Δtfext
Äußere Kräfte um eine weitere Laststufe erhöht
0tfint
Innere Kräfte des vorherigen Zeitschritts
ϕ
Verzerrung
- W punkcie 3 schematu (iteracja), obliczane jest całkowite odkształcenie pomniejszone o odkształcenie plastyczne (etap korekty). Celem obliczeń iteracyjnych jest zawsze to, aby suma obciążeń zewnętrznych i sił wewnętrznych wynosiła zero. Z numerycznego punktu widzenia nie jest to jednak możliwe. Dlatego definiuje się granicę przerwania iteracji ε, przy której obliczenia nie są kontynuowane jako wystarczająco dokładne.
R
Abbruchrate
fext
äußere Kräfte
fint
innere Kräfte
ε
Epsilon Abbruchrate
t
Zeitschritt
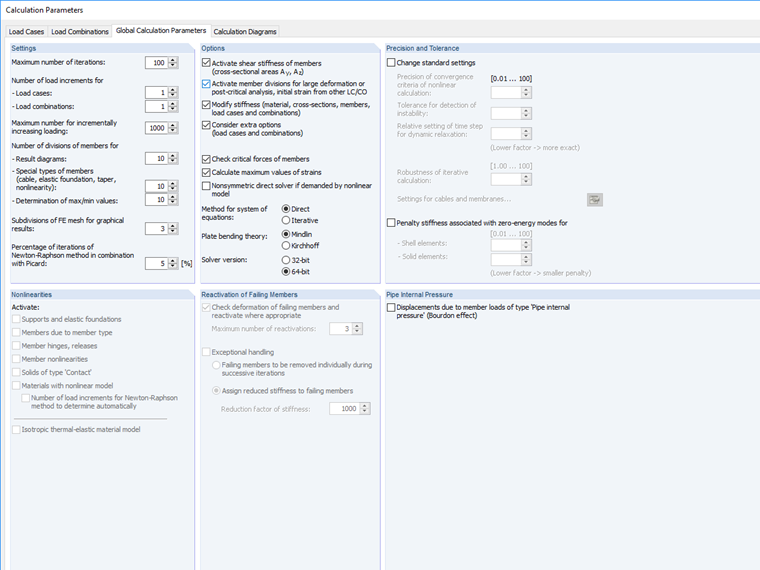
W programie można ustawić granicę ε przerwania obliczeń w parametrach obliczeniowych.
Poniższy rysunek pokazuje przebieg iteracji Newtona-Raphsona. W pierwszej iteracji
granica przerwania obliczeń R lub ε nie zostaje osiągnięta. Granica tolerancji również nie została osiągnięta w drugiej iteracji (kolor czerwony). Dopiero w trzeciej iteracji odległość aproksymowanej sztywności stycznej od tej rzeczywistej jest na tyle mała, że osiąga się zbieżność.
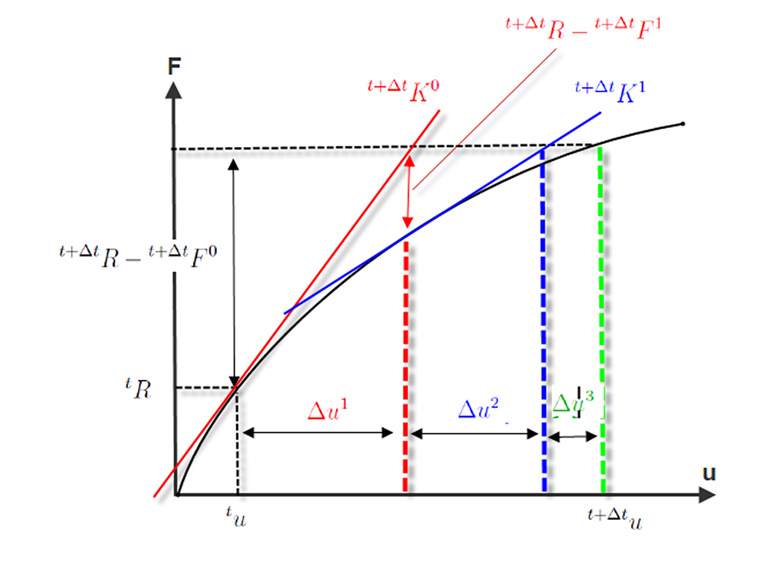
Jak już wspomniano, odkształcenie jest podczas iteracji sumowane w sposób ciągły.
Uwagi końcowe
Metoda iteracyjna Newtona-Raphsona ma spójność lub rząd zbieżności 2. Liczba „prawidłowych” lokalizacji w iteracji podwaja się z każdym krokiem. I tak, iteracja Newtona-Raphsona jest zbieżna kwadratowo, a dokładność wzrasta z każdą iteracją, gdy metoda jest zbieżna. Jeżeli jednak metoda nie jest zbieżna, błąd dąży do nieskończoności, a obliczenia zostają zatrzymane.
Przyczyny braku zbieżności to na przykład zbyt strome nachylenie krzywej obciążenie-odkształcenie lub zbyt małe nachylenie tej krzywej w obszarze plastycznym. Jeżeli krzywa obciążenie- deformacja na powyższym rysunku wykazywałaby zbyt dużą zmianę w drugim kroku iteracji, styczna materiału, a tym samym macierz sztywności, nie odwzorowywałaby prawidłowo nachylenia krzywej w obszarze sprężystym. W takim przypadku nachylenie krzywej dla rozwiązania cząstkowego byłoby nieprawidłowe w obszarze plastycznym. Jest to jeden z powodów, dla których wzrostowi w kroku obciążenia towarzyszy lepsza zbieżność.
