RFEM 6 jest programem głównym pakietu oprogramowania, który służy do analizy konstrukcji przy użyciu MES. Dalsze analizy oraz wymiarowanie przeprowadzane jest w odpowiednich rozszerzeniach. Program główny RFEM 6 służy do definiowania konstrukcji, materiałów i obciążeń płaskich i przestrzennych układów konstrukcyjnych składających się z płyt, ścian, powłok i prętów. Program umożliwia również tworzenie konstrukcji mieszanych oraz modelowanie elementów bryłowych i kontaktowych.
RSTAB 9 to wydajne oprogramowanie do obliczeń konstrukcji szkieletowych 3D, odzwierciedlające aktualny stan wiedzy i pomagające inżynierom sprostać wymaganiom współczesnej inżynierii lądowej.
Często zbyt długo zajmujesz się obliczaniem przekrojów? Oprogramowanie firmy Dlubal i program samodzielny RSECTION ułatwiają pracę, określając i przeprowadzając analizę naprężeń dla różnych przekrojów.
Czy zawsze wiesz, skąd wieje wiatr? Oczywiście od strony innowacji! RWIND 2 to program, który wykorzystuje cyfrowy tunel aerodynamiczny do numerycznej symulacji przepływu wiatru. Program symuluje przepływ wokół dowolnej geometrii budynku i określa obciążenia wiatrem na powierzchnie.
Szukasz narzędzia do przeglądu stref obciążenia śniegiem, wiatrem i trzęsieniem ziemi? Dobrze trafiłeś! Skorzystaj z narzędzia do geolokalizacji do szybkiego i skutecznego definiowania obciążenia śniegiem, prędkości wiatru, obciążenia trzęsieniem ziemi, zgodnie z Eurokodem i innymi międzynarodowymi normami.
Chcesz wypróbować możliwości programów Dlubal Software? To Twoja szansa! Dzięki 90-dniowej pełnej wersji, możesz w pełni przetestować wszystkie nasze programy.
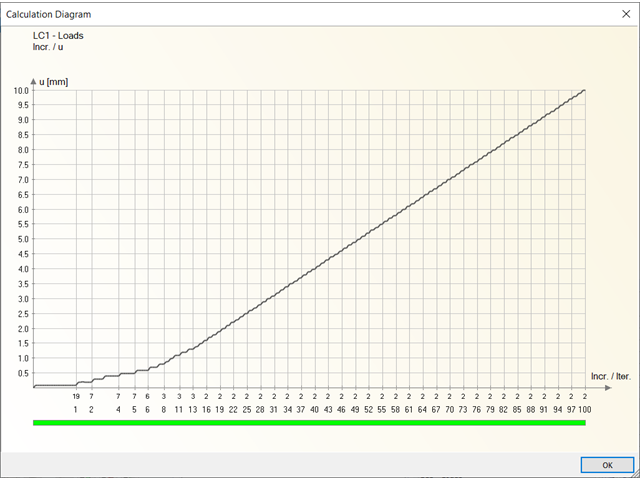
W parametrach obliczeniowych programów RFEM 5 i RSTAB 8 w zakładce Globalne parametry obliczeń dostępne są pola wprowadzania Liczba przyrostów obciążenia dla przypadków obciążeń/ kombinacji obciążeń. Diese zwei Eingaben steuern die numerische stufenweise Aufbringung der definierten Lastrandbedingungen in den jeweiligen Lastfällen und Lastkombinationen. Dabei beschreibt der reziproke Wert der Eingabe einen Bruchteil der Last. Der Lösungsprozess bringt dann in sogenannten Laststufen die definierten Lastbruchteile sukzessive bis zum Erreichen der vollständigen Last auf das Modell auf. In den einzelnen Laststufen versucht der Gleichungslöser im Rahmen der maximal erlaubten Iterationen ein Gleichgewicht zu finden und damit passenden Startwerte für die nächste Laststufe vorzugeben.
Bildlich kann man sich vorstellen, dass der Lösungsprozess die komplette Last eines Lastfalls oder einer Lastkombination in einer "Gießkanne" sammelt und portionsweise auf das lastsammelnde Modell gießt. Die Anzahl der Laststufen korreliert hierbei mit der Geschwindigkeit der Aufbringung. Dabei ist die Geschwindigkeit nicht als realer Zeitparameter, sondern rein numerisch zu verstehen.
Wichtig: Die stufenweise Lastaufbringung hat nur einen Effekt bei nichtlinearen Tragsystemen. Sie liefert in der Regel mit steigernder Anzahl von Laststufen eine entsprechend höhere Ergebnisqualität. Grundsätzliches Ziel dieser Methode ist es, in den jeweiligen Laststufen eine Mikrokonvergenz zur Vorgabe neuer hochwertiger Startwerte für die nächste Laststufe zu finden und damit final eine Makrokonvergenz für den ganzen Lastfall zu erreichen.
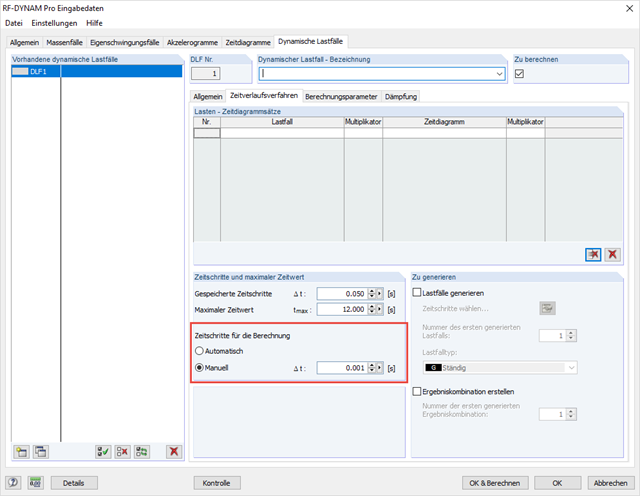
Es stehen zwei Auswahlmöglichkeiten zur Verfügung: eine automatische Zeitschrittwahl und eine manuelle. Gerade für eine Struktur mit Nichtlinearitäten wird immer empfohlen, den Zeitschritt manuell zu wählen, da die automatische Ermittlung nur anhand der definierten Akzelerogramme bzw. Zeitdiagramme durchgeführt wird. Dafür sollte eine Zeitschrittkonvergenzstudie durchgeführt werden, welche die Berechnungszeit und die Genauigkeit ins Verhältnis setzt.
Der zu wählende Zeitschritt ist von vielen Faktoren abhängig, darunter die Erregungsfrequenz, die Frequenz und die Größe der Struktur, sowie der Grad an Nichtlinearitäten. Es kann also keine allgemeingültige Aussage über die Größe des Zeitschritts getroffen werden.
Um eine ausreichende Genauigkeit zu erreichen, sollte die maßgebende Periode T = 1/f in etwa 20 Schritte unterteilt werden, d. h. der Zeitschritt Δt ist wie folgt zu wählen:
$\mathrm{Δt}\;<\frac{\mathrm T}{20}\;=\;\frac1{20\mathrm f}\;=\;\frac{\mathrm\pi}{10\mathrm\omega\;}$
Für transient definierte Anregungen, wie Akzelerogramme oder tabellierte Zeitdiagramme, sollte der kürzeste Zeitabschnitt in 7 Schritte unterteilt werden:
$\mathrm{Δt}\;=\;\frac{\mathrm{Min}\left\{{\mathrm t}_{\mathrm i+1}\right.-\;{\mathrm t}_{\mathrm i}\}\;}7$
Unabhängig der Berechnung werden Zeitschritte zum Speichern der Ergebnisse angegeben.