Система координат (СК) - это основная система, служащая для четкого определения объектов, расположенных в геометрическом пространстве. У системы координат всегда имеется начало, на основе которого можно в зависимости от типа системы координат четко определить местоположения объектов.
Типы систем координат в программе RFEM и RSTAB
- Декартова (X, Y, Z): Наиболее распространенная система координат. Она задана тремя ортогональными осями во взаимно перпендикулярном расположении. Соответственно, оси X, Y, Z всегда являются поступательным расширением.
- X-цилиндрическая (X, R, φ): Ее можно представить себе как цилиндр, высота которого соответствует оси X. Die Punkte auf dem Zylinder werden dabei jeweils durch die Höhe (X-Koordinate), den Radius des Zylinders (R) sowie den Winkel (φ) bestimmt.
- Y-цилиндрическая (R, Y, φ): аналогична Х-цилиндрической.
- Z-цилиндрическая (R, φ, Z): аналогична Х-цилиндрической.
- Полярная (R, φ, θ): Это сферическая система координат, где местоположение узла описывается с помощью расстояния до начала координат (R) и значениями углов φ и θ.
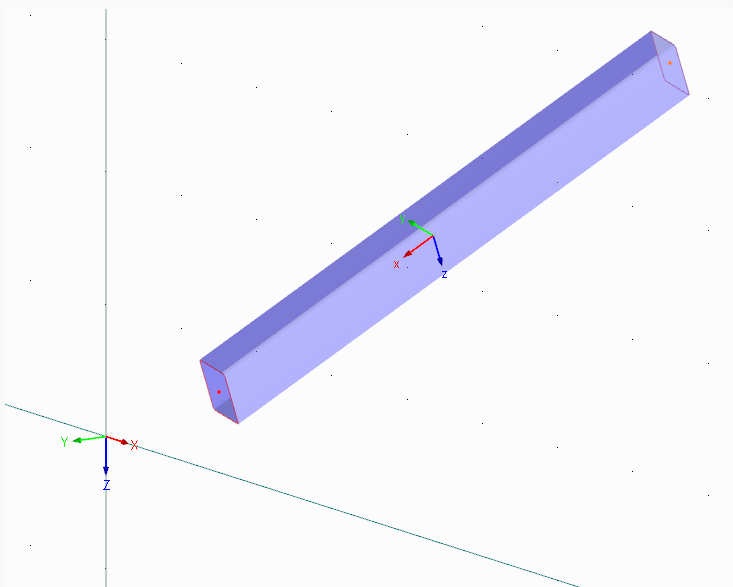
Далее, можно также различать общие и местные системы координат. Все выше описанные системы определяют всегда общую систему координат. Lokale Koordinatensysteme sind meist objektspezifisch. в отличие от общей системы координат, обозначаются строчными буквами.