Un système de coordonnées (SC ou CS, en anglais) est un système de référence pour définir de manière explicite des objets dans un espace géométrique. Celui-ci présente toujours un point d'origine à partir duquel est possible de localiser précisément les objets dans l'espace en fonction du type de système de coordonnées.
Types de système de coordonnées dans RFEM et RSTAB
- Cartésien (X, Y, Z) : le système le plus courant, défini par trois axes orthogonaux perpendiculaires. Les translations sont toujours exprimées à l'aide des axes X, Y et Z.
- Cylindrique en X (X, R, φ) : ce système peut être visualisé sous forme d'un cylindre dont la hauteur d'axe correspond à X. Die Punkte auf dem Zylinder werden dabei jeweils durch die Höhe (X-Koordinate), den Radius des Zylinders (R) sowie den Winkel (φ) bestimmt.
- Cylindrique en Y (R, Y, φ): similaire au système cylindrique en X.
- Cylindrique en Z (R, φ, Z) : similaire au système cylindrique en X.
- Polaire (R, φ, θ) : il s'agit d'un système de coordonnées sphérique où la position du nœud est décrite par la distance à l'origine (R) ainsi que les angles φ e θ.
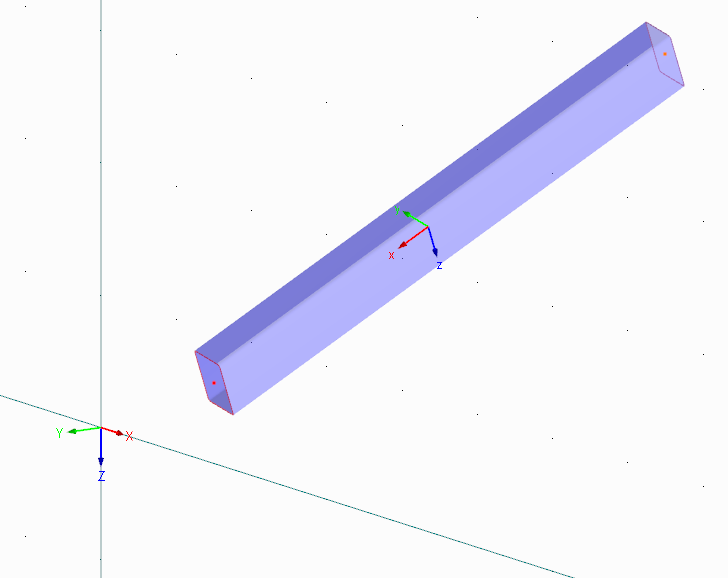
Il existe en outre une distinction entre un système de coordonnées global et un système local. Les types de système décrits ci-dessus s'appliquent aux systèmes globaux. Lokale Koordinatensysteme sind meist objektspezifisch. Contrairement aux systèmes de coordonnées globaux, les systèmes locaux sont désignés par des lettres minuscules.