






Nonlinear calculations in general yield a system of nonlinear algebraic equations which need to be solved. The robustness of the nonlinear solver is a crucial part of the calculation process within the framework of finite element analysis. The nonlinear method transforms the nonlinear problem into a sequence of linear problems, which are then solved by a linear solver. There are six available methods for solving the nonlinear, algebraic system of equations.
Newton-Raphson
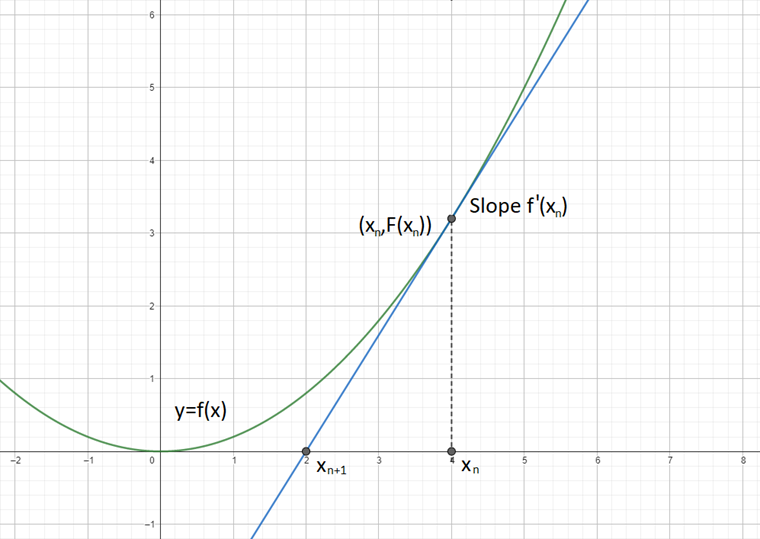
The Newton-Raphson nonlinear method is preferred in case of a continuous right-hand side. In this method, the tangential stiffness matrix is calculated as a function of the current deformation state and inverted in every iteration cycle. In the majority of cases, the method features a fast (quadratic) convergence.
Picard
In case of discontinuities, the Picard method can be used as a more robust choice. This method is also known as the fixed-point iteration method or secant method. It can be thought of as a finite-difference approximation of the Newton method. The difference is considered between the current iteration cycle and the initial iteration cycle in the current load step. The method does not converge as quickly as Newton's method in general, but it can be more robust for some nonlinear problems.
Newton–Raphson Combined with Picard
The idea of this combination method is to bring together the advantages of both methods. For the initial approximation, the Picard method is used to avoid initial instabilities. Afterwards, the fast Newton-Raphson method is used. Together, a robust and relatively fast approximation can be achieved.
In the settings the proportions of the respective methods can be defined.
Newton-Raphson with Constant Stiffness Matrix
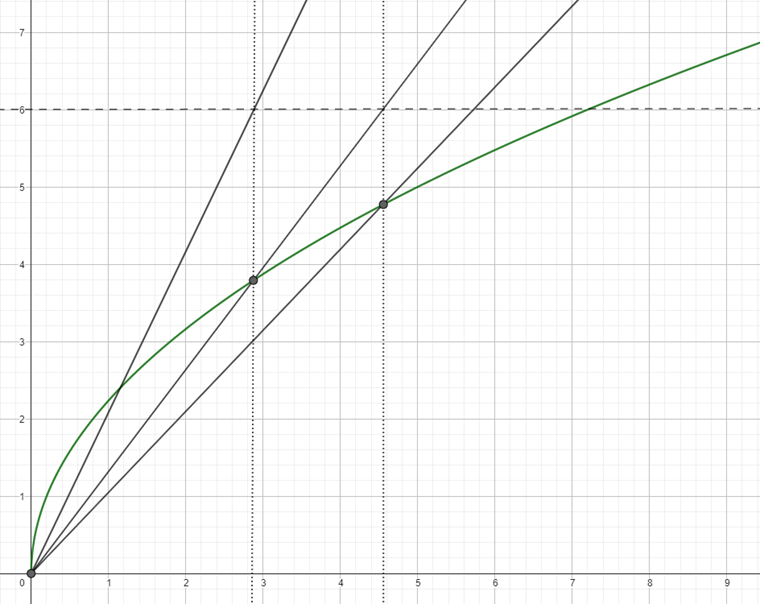
This version of the Newton-Raphson method can be selected for calculations according to the large deformation analysis. The stiffness matrix is created only once in the first iteration step, then used in all subsequent calculation loops (therefore constant). Thus, the calculation runs faster but is not as stable as calculations according to the normal or modified Newton-Raphson method.
For lower degrees of freedom, the Newton-Raphson method tends to be more efficient. For small variations of the slope in the function, the Constant Stiffness method usually has the advantage. If the slope experiences drastic changes, however, Newton-Raphson is usually recommended.
Modified Newton-Raphson
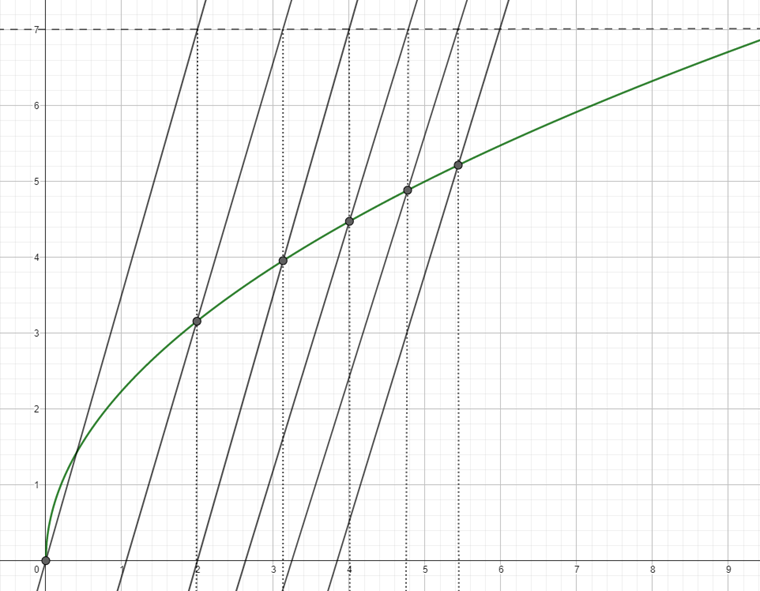
This method is used to perform the postcritical analysis where a range with instability must be overcome. If an instability is available and the stiffness matrix cannot be inverted, the program uses the stiffness matrix of the last stable iteration step. The program continues to calculate with this matrix until a stability range is reached again.
Compared to (regular) Newton-Raphson, the Modified Newton-Raphson tends to converge slower (linear) with more, but computationally inexpensive iterations and is more robust for extreme nonlinearities (like brittle cracking) where Newton-Raphson might fail.
Dynamic Relaxation
The final method is suitable for calculations according to the large deformation analysis and for solving problems regarding the postcritical analysis. In this approach, an artificial time parameter is introduced. Taking inertia and damping into account, the failure can be handled as a dynamic problem. This approach uses the explicit time-integration method; the stiffness matrix is not inverted. No part of the model is allowed to have a specific weight of zero when calculating with dynamic relaxation. This method includes the Rayleigh damping that can be defined by means of the constants α and β according to the following equation with the time derivatives:
|
M |
Concentrated (diagonal) mass matrix |
|
C |
Diagonal damping matrix |
|
K |
Stiffness matrix |
|
f |
Vector of external forces |
|
u |
Discretized displacement vector |