Les calculs non linéaires génèrent généralement un système d'équations algébriques non linéaires qui doivent être résolues. La robustesse du solveur non linéaire est une partie cruciale du processus de calcul dans le cadre de l'analyse aux éléments finis. La méthode non linéaire transforme le problème non linéaire en une séquence de problèmes linéaires qui sont ensuite résolus par un solveur linéaire. Six méthodes sont disponibles pour la résolution du système non-linéaire algébrique d'équations.
Newton-Raphson
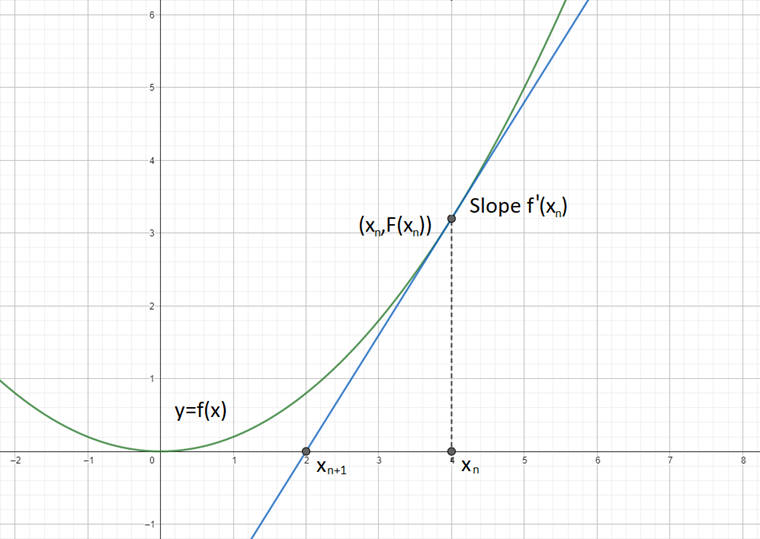
La méthode non linéaire de Newton-Raphson est préférée dans le cas d'un côté droit continu. Dans cette méthode, la matrice de rigidité tangentielle est calculée en fonction de l'état actuel de déformation et inversée à chaque cycle d'itération. Dans la plupart des cas, la méthode se caractérise par une convergence (quadratique) rapide.
Selon Picard
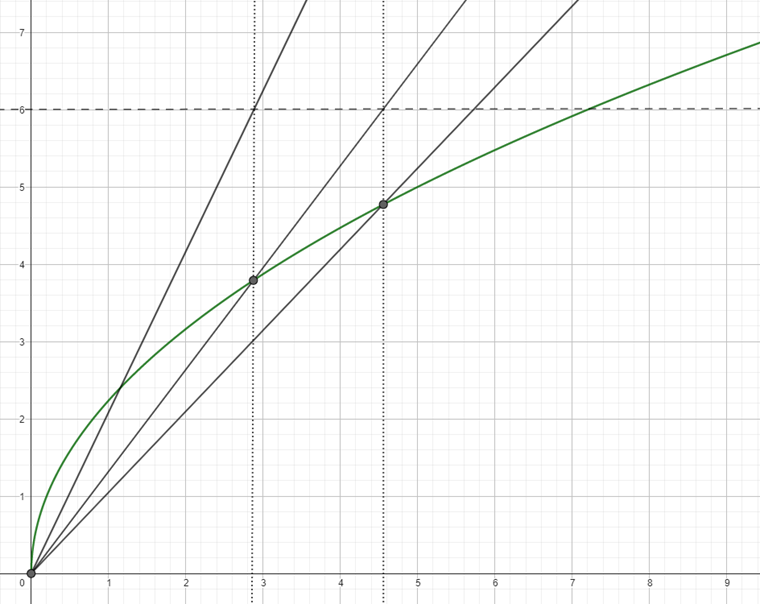
En cas de discontinuités, la méthode de Picard peut être utilisée comme un choix plus robuste. Cette méthode est également connue sous le nom de méthode d'itération en virgule fixe ou méthode de la sécante. Elle peut être considérée comme une approximation aux différences finies de la méthode de Newton. La différence est considérée entre le cycle d'itérations actuel et le cycle d'itérations initial dans le pas de charge actuel. La méthode ne converge pas aussi rapidement que la méthode de Newton' en général, mais elle peut être plus robuste dans certains problèmes non linéaires.
Newton-Raphson combiné avec Picard
L'idée de cette méthode de combinaison est de combiner les avantages des deux méthodes. La méthode de Picard est utilisée pour l'approximation initiale afin d'éviter les instabilités initiales. La méthode rapide de Newton-Raphson est ensuite utilisée. Ensemble, une approximation fiable et relativement rapide peut être obtenue.
Les proportions des méthodes respectives peuvent être définies dans les paramètres.
Méthode selon Newton-Raphson avec matrice de rigidité constante
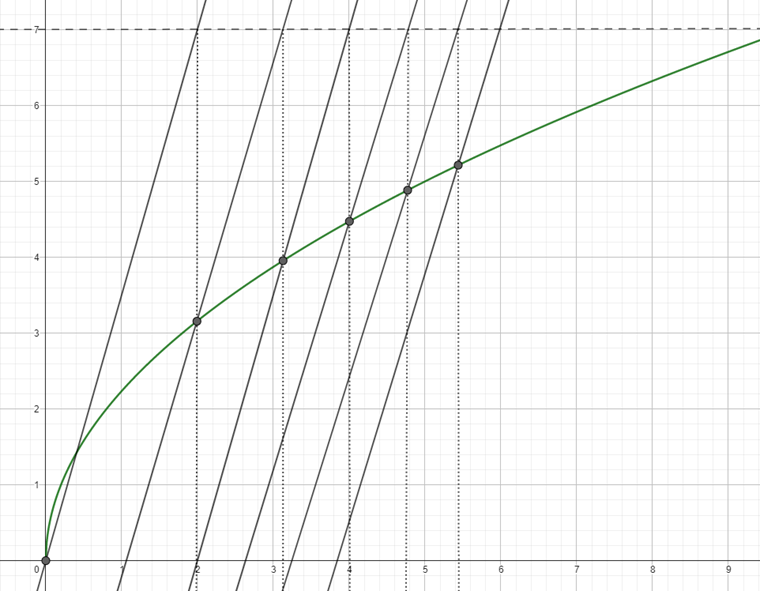
Cette version de la méthode Newton-Raphson peut être sélectionnée pour les calculs selon l'analyse des grandes déformations. La matrice de rigidité n'est créée qu'après le premier pas d'itération et est ensuite utilisée dans tous les cycles de calcul suivants (constante). Ainsi, le calcul est plus rapide mais moins stable, comme un calcul par la méthode normale ou modifiée selon Newton-Raphson.
Pour des degrés de liberté inférieurs, la méthode de Newton-Raphson a tendance à être plus efficace. Pour les petites variations de la pente dans la fonction, la méthode à rigidité constante présente généralement l'avantage. Cependant, si la pente subit des changements structuraux, Newton-Raphson est généralement recommandé.
Newton-Raphson modifié
Cette méthode est utilisée pour effectuer l'analyse post-critique où un éventail d'instabilités doit être résolu. S'il y a une instabilité et que la matrice de rigidité ne peut pas être inversée, le programme utilise la matrice de rigidité de la dernière étape d'itération stable. Le programme continue à calculer avec cette matrice jusqu'à ce qu'une stabilité soit de nouveau atteinte.
Par rapport au Newton-Raphson (régulier), le Newton-Raphson modifié a tendance à converger plus lentement (linéaire) avec des itérations plus nombreuses, mais peu coûteuses en calcul et est plus robuste pour les non-linéarités extrêmes (comme la fissuration de rupture) où Newton-Raphson peut échouer.
Relaxation dynamique
La méthode finale est appropriée pour les calculs selon l'analyse des grandes déformations et pour la résolution de problèmes relatifs à l'analyse post-critique. Dans cette approche, un paramètre de temps artificiel est introduit. En considérant l'inertie et l'amortissement, l'échec peut être pris comme un problème dynamique. Cette approche utilise la méthode d'intégration en temps explicite ; la matrice de rigidité n'est pas inversée. Pour un calcul avec une relaxation dynamique, aucune partie du modèle ne doit avoir un poids spécifique nul. Cette méthode comprend l'amortissement de Rayleigh définissable à travers les constantes α et β selon l'équation suivante avec les dérivées par rapport au temps:
|
M |
Concentrated (diagonal) mass matrix |
|
C |
Diagonal damping matrix |
|
K |
Stiffness matrix |
|
f |
Vector of external forces |
|
u |
Discretized displacement vector |






















_1.jpg?mw=350&hash=ab2086621f4e50c8c8fb8f3c211a22bc246e0552)


-querkraft-hertha-hurnaus.jpg?mw=350&hash=3306957537863c7a7dc17160e2ced5806b35a7fb)



