






Nichtlineare Berechnungen führen im Allgemeinen zu einem System nichtlinearer algebraischer Gleichungen, das gelöst werden muss. Die Robustheit des nichtlinearen Lösers ist ein entscheidender Bestandteil des Berechnungsprozesses im Rahmen der Finite-Elemente-Analyse. Die nichtlineare Methode wandelt das nichtlineare Problem in eine Folge linearer Probleme um, die dann von einem linearen Solver gelöst werden. Es stehen sechs Methoden zur Lösung des nichtlinearen, algebraischen Gleichungssystems zur Verfügung.
Newton-Raphson
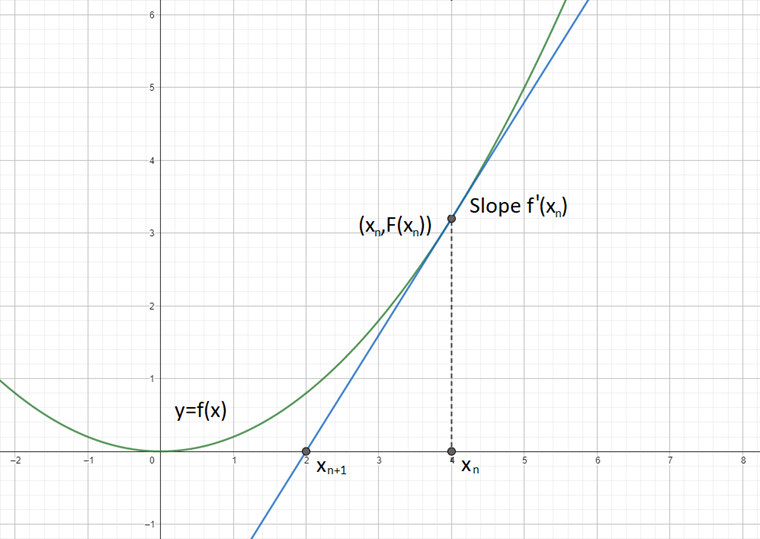
Bei einer kontinuerlichen rechten Seite wird die nichtlineare Newton-Raphson-Methode bevorzugt. Bei dieser Methode wird die Tangentialsteifigkeitsmatrix als Funktion des aktuellen Verformungszustands berechnet und in jedem Iterationszyklus invertiert. In den meisten Fällen zeichnet sich die Methode durch eine schnelle (quadratische) Konvergenz aus.
Picard
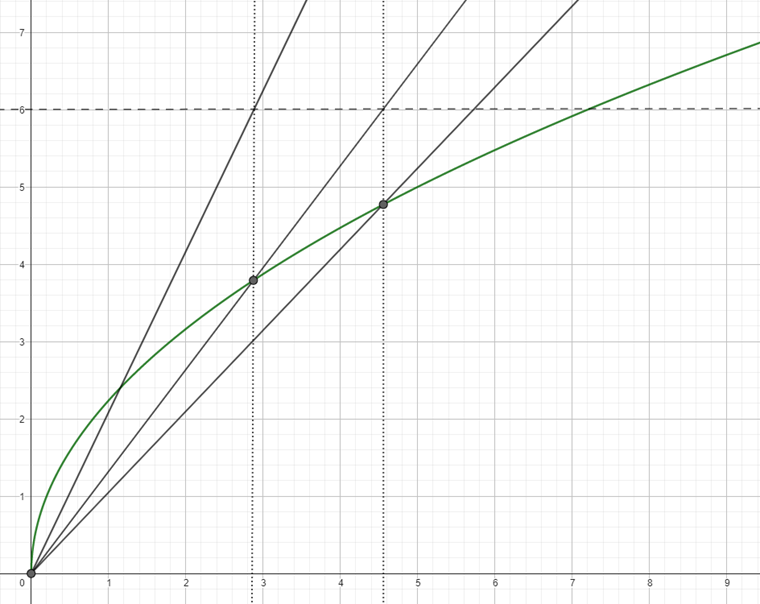
Bei Unstetigkeiten kann die Picard-Methode als robustere Alternative eingesetzt werden. Diese Methode ist auch als Fixpunkt-Iterationsverfahren oder Sekantenverfahren bekannt. Man kann sie sich als eine Finite-Differenzen-Näherung der Newton-Methode vorstellen. Dabei wird die Differenz zwischen dem aktuellen Iterationszyklus und dem anfänglichen Iterationszyklus im aktuellen Lastschritt betrachtet. Die Methode konvergiert im Allgemeinen nicht so schnell wie die Methode von Newton, kann jedoch bei einigen nichtlinearen Problemen robuster sein.
Newton-Raphson kombiniert mit Picard
Der Grundgedanke dieser Kombinationsmethode besteht darin, die Vorteile beider Methoden zu vereinen. Für die erste Annäherung wird die Picard-Methode verwendet, um anfängliche Instabilitäten zu vermeiden. Anschließend kommt die schnelle Newton-Raphson-Methode zum Einsatz. Zusammen lässt sich so eine robuste und relativ schnelle Annäherung erzielen.
In den Einstellungen können die Anteile der jeweiligen Methoden festgelegt werden.
Newton-Raphson mit konstanter Steifigkeitsmatrix
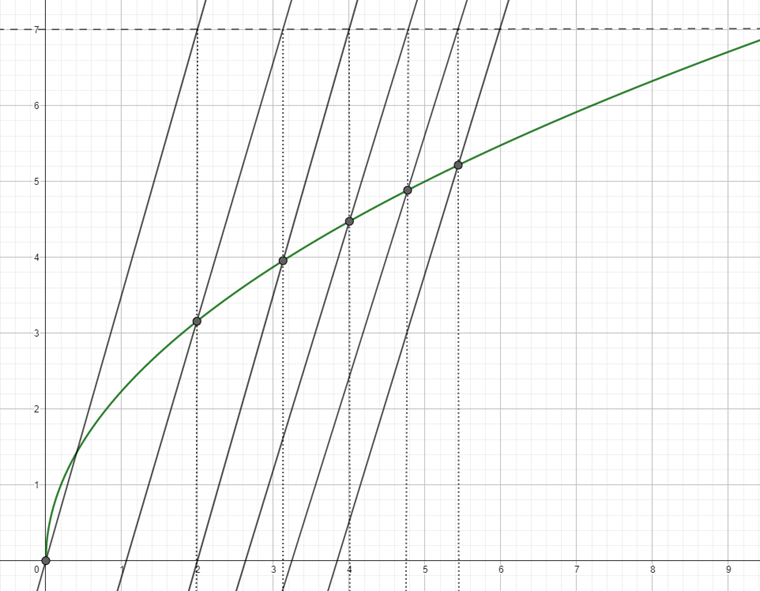
Diese Variante der Newton-Raphson-Methode kann für Berechnungen nach Theorie III. Ordnung ausgewählt werden. Die Steifigkeitsmatrix wird nur einmal im ersten Iterationsschritt erstellt und dann in allen nachfolgenden Berechnungsschleifen verwendet (sie ist also konstant). Dadurch läuft die Berechnung schneller, ist jedoch nicht so stabil wie Berechnungen nach der normalen oder modifizierten Newton-Raphson-Methode.
Bei niedrigeren Freiheitsgraden ist die Newton-Raphson-Methode tendenziell effizienter. Bei geringen Schwankungen der Steigung in der Funktion ist die Methode mit konstanter Steifigkeit in der Regel vorteilhaft. Bei starken Schwankungen der Steigung wird jedoch meist die Newton-Raphson-Methode empfohlen.
Modifizierter Newton-Raphson
Diese Methode wird zur Durchführung des Durchschlagproblems verwendet, bei dem ein Bereich mit Instabilität überwunden werden muss. Liegt eine Instabilität vor und kann die Steifigkeitsmatrix nicht invertiert werden, verwendet das Programm die Steifigkeitsmatrix des letzten stabilen Iterationsschritts. Das Programm rechnet mit dieser Matrix weiter, bis wieder ein stabiler Bereich erreicht ist.
Im Vergleich zum (regulären) Newton-Raphson-Verfahren konvergiert das modifizierte Newton-Raphson-Verfahren tendenziell langsamer (linear) mit mehr, aber rechnerisch weniger aufwendigen Iterationen und ist robuster bei extremen Nichtlinearitäten (wie Sprödrissbildung), bei denen Newton-Raphson versagen könnte.
Dynamische Relaxation
Die letzte Methode eignet sich für Berechnungen nach Theorie III. Ordnung sowie zur Lösung von Durchschlagproblemen. Bei diesem Ansatz wird ein künstlicher Zeitparameter eingeführt. Unter Berücksichtigung von Trägheit und Dämpfung kann das Versagen als dynamisches Problem behandelt werden. Dieser Ansatz nutzt die explizite Zeit-Integrationsmethode; die Steifigkeitsmatrix wird nicht invertiert. Bei der Berechnung mit dynamischer Relaxation darf kein Teil des Modells ein spezifisches Gewicht von Null aufweisen. Diese Methode beinhaltet die Rayleigh-Dämpfung, die mittels der Konstanten α und β gemäß der folgenden Gleichung mit den Zeitableitungen definiert werden kann:
|
M |
Concentrated (diagonal) mass matrix |
|
C |
Diagonal damping matrix |
|
K |
Stiffness matrix |
|
f |
Vector of external forces |
|
u |
Discretized displacement vector |