Due to the nonlinear calculation, the definition of slippage in particular is a challenge for the equation solver. The following hints can help you to avoid possible instabilities.
Load Increments
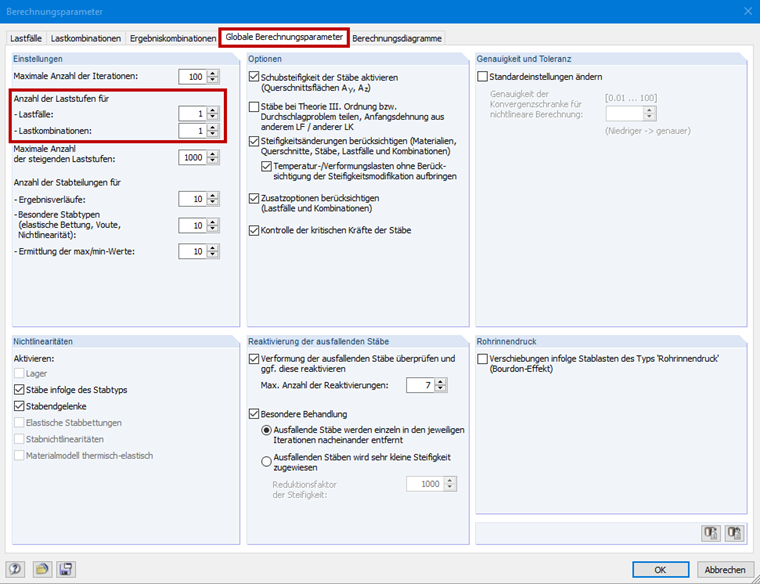
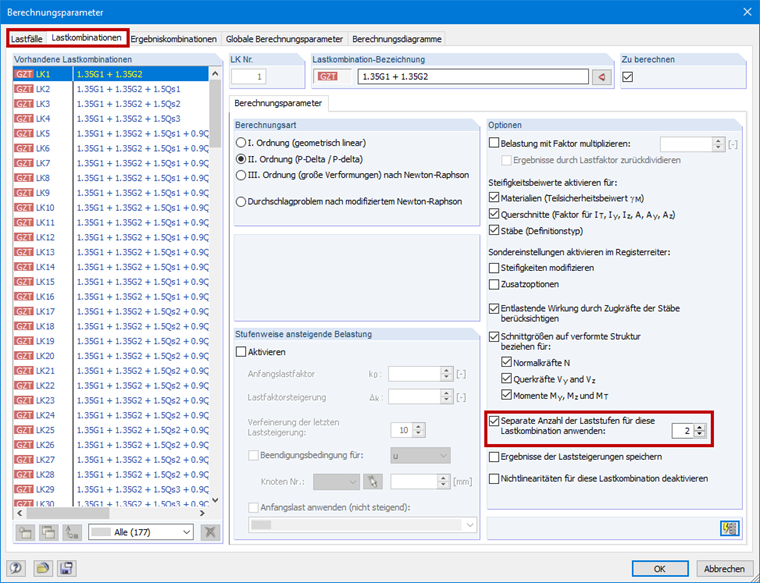
When considering nonlinearities, it is often difficult to find the equilibrium. You can avoid instabilities by applying the loading in several steps (see Image 01). For example, if two load steps are specified, half of the load is applied in the first step. It is iterated until the equilibrium is found. In the second step, the full load is then applied to the already deformed system and iterated again until the equilibrium is found. Please keep in mind that the load increments have an unfavorable effect on the computing time. Therefore, 1 (that is, no incrementally increasing load) is preset in the text box. Furthermore, it is possible to specify how many load steps should be applied for each load case and load combination (see Image 02). The global specifications are then ignored.
Definition of Slippage
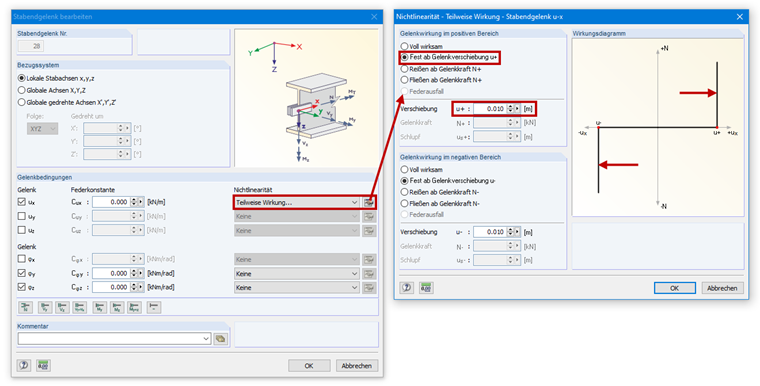
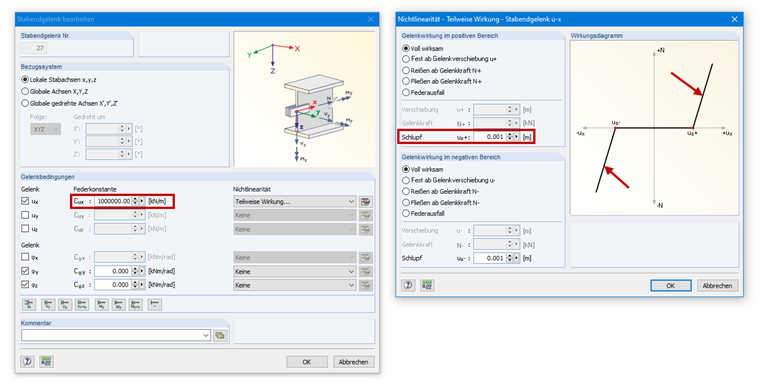
Generally, slippage (for example, in a connection) is defined by means of the "Partial Activity" nonlinearity (see Image 03). It can be used to define the hinge displacement from which the forces should be transferred. As you can see in the diagram, the stop - that is, the stiffness that acts according to the corresponding release displacement - is considered as rigid (vertical branch; see the red arrows). However, under certain circumstances, this may lead to numerical problems in the calculation. To avoid this, the stiffness that acts according to the release displacement should be reduced slightly. You can achieve this by defining a very stiff spring (see Image 04).
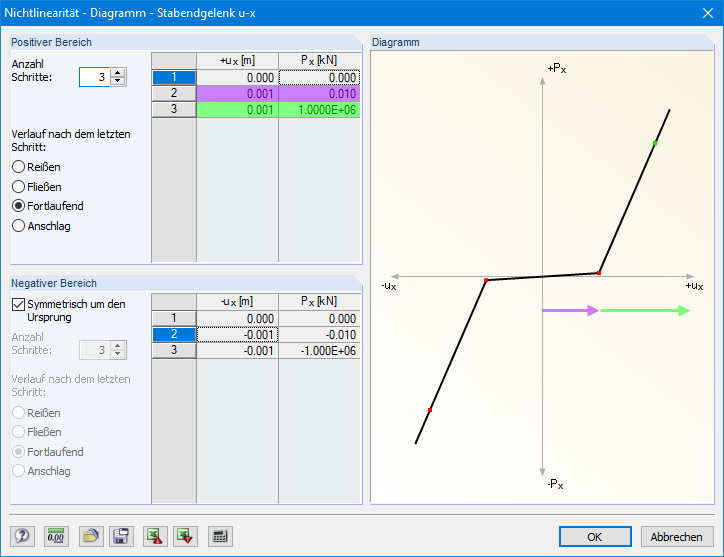
In addition to the very stiff stop, numerical problems may occur within the slippage. In this case, a small stiffness has to be considered for the effect of the slippage in order to increase the horizontal branch slightly. A stiffness should be selected that is so small, it has no decisive effect (see Image 05). This situation is possible using the "Diagram" nonlinearity.
Arrangement of Member Hinges
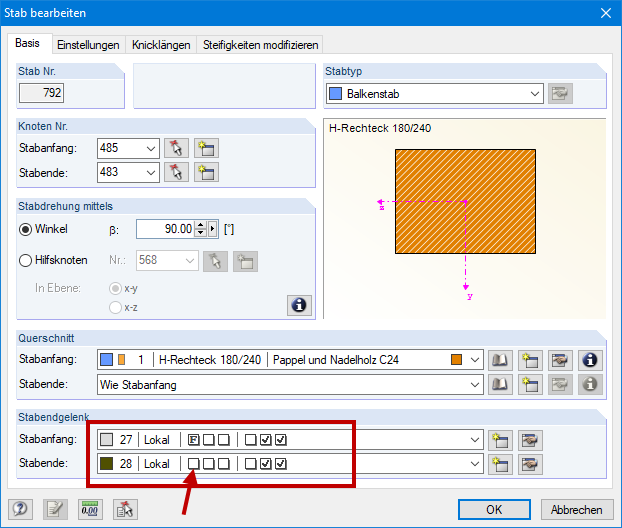
When arranging the hinges, you should ensure that they are not defined in the same direction on both member ends. Thus, there is a state in which the member is not sufficiently supported and the system fails in the first iterations. In such a case, the slippage on one side of the member only should be defined, and the size of the slippage adjusted accordingly (see Image 06).