To specjalne przeniesienie siły można rozwiązać w RFEM i RSTAB w następujący sposób:
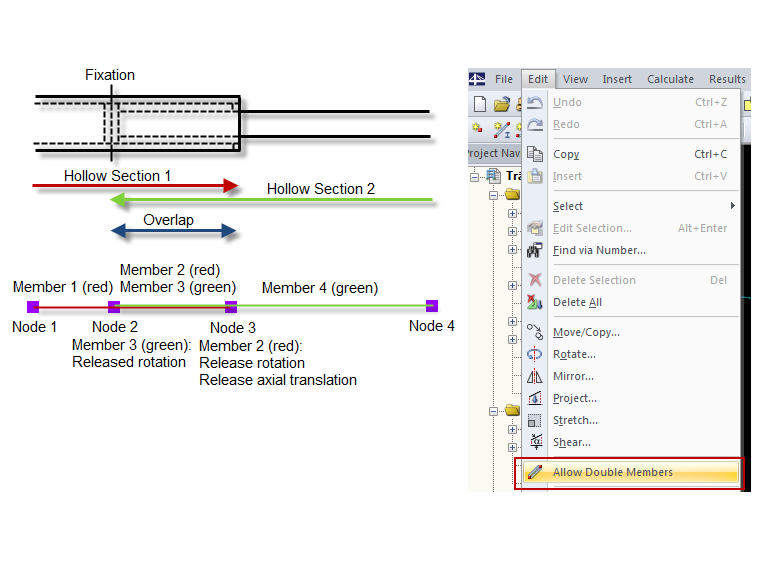
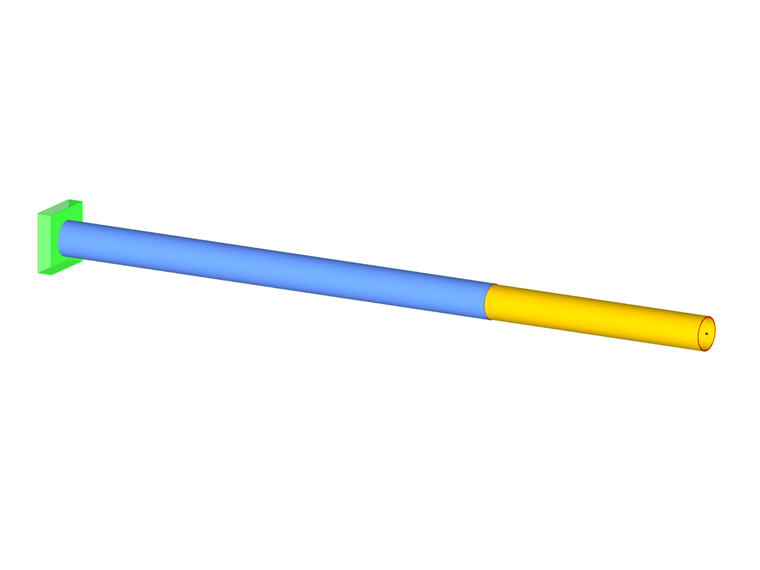
Charakterystyczne połączenie wtykowe, takie jak pokazane na rysunku, składa się z czterech prętów pomiędzy czterema węzłami. W nakładającym się obszarze zachodzą na siebie dwa pręty, każdy połączony z tymi samymi węzłami (Węzeł 2 i Węzeł 3). Aby zapewnić, że siła jest przenoszona tylko z pręta 4 na pręt 1 za pośrednictwem pary sił na końcach nakładających się prętów, konieczne jest rozmieszczenie określonych przegubów pręta na zachodzących na siebie prętach. Moment przegubowy na pręcie 2 w węźle 3 i na pręcie 3 w węźle 2 powinien zapewnić, że obciążenie związane z momentem zginającym pomiędzy prętami czerwonymi (1 i 2) a zielonymi (pręt 3 i pręt 4) jest przenoszone przez siłę para w węźle 2 i 3. Przegub siły osiowej na pręcie 2 w węźle 3 powinien zapewniać, że obciążenie siłą osiową jest przenoszone tylko między zielonymi i czerwonymi ciągłymi prętami dla planowanego zamocowania w węźle 2.
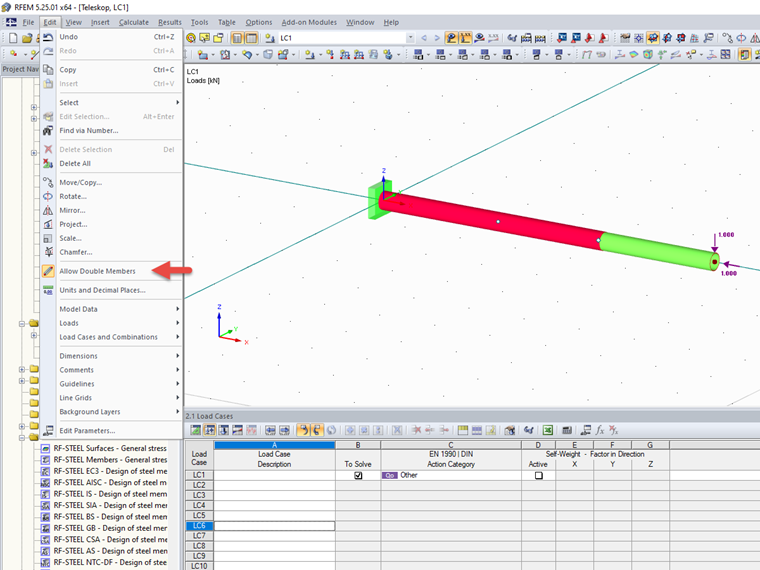
Zasadniczo programy RFEM i RSTAB rozpoznają nałożone pręty jako błędy w modelowaniu i próbują automatycznie skorygować ten układ. Dlatego w przypadku stosowania opisanej metody modelowania przed utworzeniem modelu należy ustawić tryb „Zezwalaj na podwójne pręty”.