Answer:
Friction is a nonlinearity and can therefore only be modified via the interface to the member hinge.
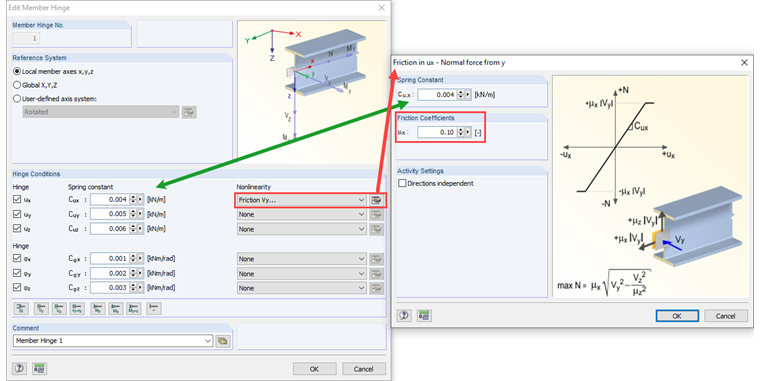
For this, it is first necessary to create the member hinge, if not already available. Then, the IMemberHinge interface is brought to the member hinge and then to the nonlinearity (here IFriction). Then, you can use the methods GetData and SetData to modify the data (here Friction):
Sub SetMemberHingeFriction()
Dim model As RFEM5.model
Set model = GetObject(, "RFEM5.Model")
model.GetApplication.LockLicense
On Error GoTo e
Dim data As IModelData
Set data = model.GetModelData
Dim hinge(0 To 0) As RFEM5.MemberHinge
hinge(0).No = 1
hinge(0).RotationalConstantX = 1
hinge(0).RotationalConstantY = 2
hinge(0).RotationalConstantZ = 3
hinge(0).TranslationalConstantX = 4
hinge(0).TranslationalConstantY = 5
hinge(0).TranslationalConstantZ = 6
hinge(0).Comment = "Member Hinge 1"
hinge(0).TranslationalNonlinearityX = FrictionAType
data.PrepareModification
data.SetMemberHinges hinge
data.FinishModification
' get interface for member hinge
Dim imemhing As IMemberHinge
Set imemhing = data.GetMemberHinge(1, AtNo)
' get interface for nonlinearity "friction"
Dim iFric As IFriction
Set iFric = imemhing.GetNonlinearity(AlongAxisX)
' get friction data
Dim fric As Friction
fric = iFric.GetData
fric.Coefficient1 = 0.3
' set friction data
data.PrepareModification
iFric.SetData fric
data.FinishModification
e: If Err.Number <> 0 Then MsgBox Err.Description, , Err.Source
Set data = Nothing
model.GetApplication.UnlockLicense
Set model = Nothing
End SubIn the case of the friction Vy + Vz, the Coefficient2 is used to set the second coefficient. The spring constant in the Friction dialog box is controlled by the translational spring of the member hinge. In this particular case, this is TranslationalConstantX for the x‑direction (see Image 01).