La définition des charges de recherche de forme se fait via les charges d’objet correspondantes. Vous pouvez définir des charges de surface, de barre et de solide.
Les charges de surface et de barre sont de type de charge recherche de forme. Pour les charges de solide, sélectionnez le type de charge Gaz.
Pour les objets divisés dans le modèle mais qui sont en réalité connectés, il existe également des charges d’ensembles de barres, d’ensembles de surfaces, et d’ensembles de solides. Le concept de ces charges est équivalent à celui des charges régulières, elles ne seront donc pas détaillées explicitement.
Charges de barre
Les charges de barre du type de charge recherche de forme peuvent être définies géométriquement ou comme une force.
Charges de barre - Type de définition géométrique
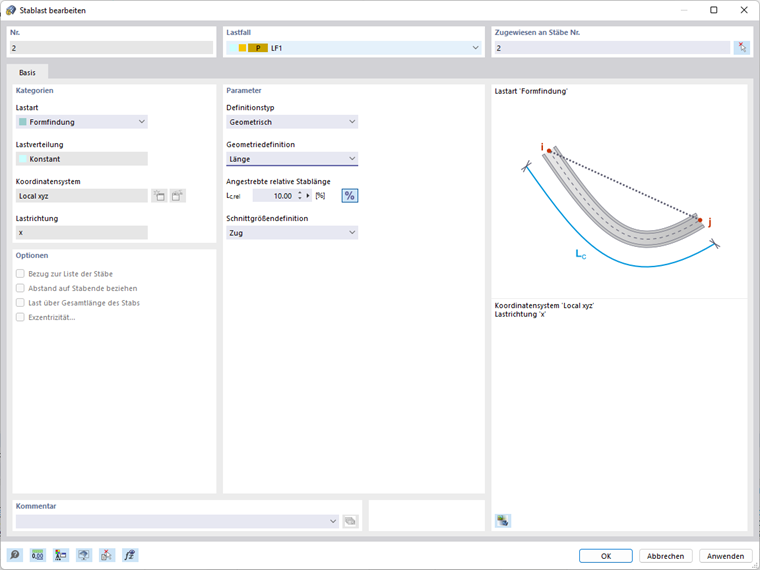
Le type de définition géométrique permet de définir la forme selon les options suivantes :
- Longueur (Lc)
- Longueur déchargée (Lmfg)
- Flèche (S)
- Flèche verticale maximale (Smax | Direction de la charge ZL)
- Flèche au point bas vertical (Slow | Direction de la charge ZL)
Pour toutes les charges géométriques, vous pouvez les définir de manière relative ou absolue. Un changement entre définition absolue et relative est possible en cliquant sur
![]() . La désignation de la charge inclut l’abréviation « rel » pour une définition relative.
. La désignation de la charge inclut l’abréviation « rel » pour une définition relative.
Pour toutes les charges géométriques, l’effort interne peut être défini en traction ou en compression. Notez que les câbles peuvent être soumis uniquement à la traction en raison de la définition. Pour une poutre, une forme peut cependant être trouvée en traction ou en compression.
Charges de barre - Type de définition force
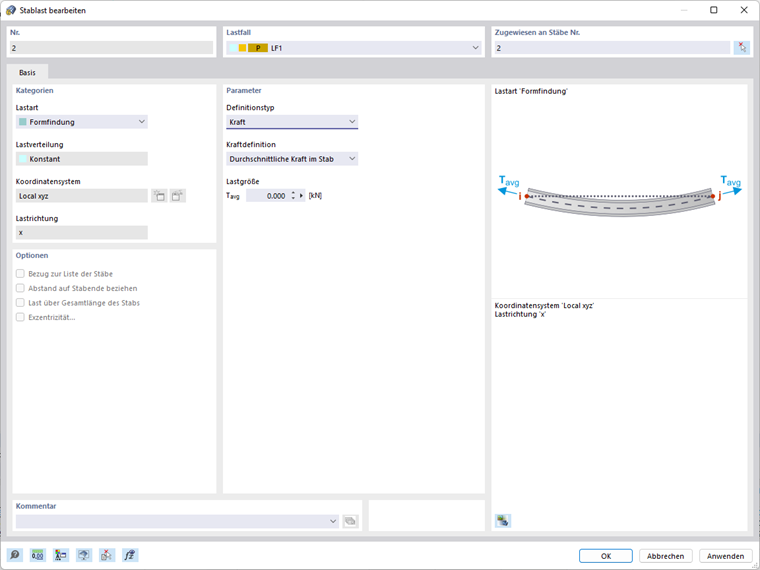
Le type de définition force permet de définir la forme selon les options suivantes :
- Force moyenne dans la barre (Tavg)
- Force maximale dans la barre (Tmax)
- Force minimale dans la barre (Tmin)
- Composante de traction horizontale (Fx)
- Traction à l’extrémité i (Ti | Début de barre)
- Traction à l’extrémité j (Tj | Fin de barre)
- Traction minimale à l’extrémité i (Tmin, i | Début de barre)
- Traction minimale à l’extrémité j (Tmin, j | Fin de barre)
- Densité de force (FD)
Charges de surface
Les charges de surface peuvent avoir la définition de recherche de forme force ou contrainte. Vous avez le choix entre la méthode standard et la méthode de projection . De plus, avec la méthode standard, la définition de recherche de forme flèche est disponible.
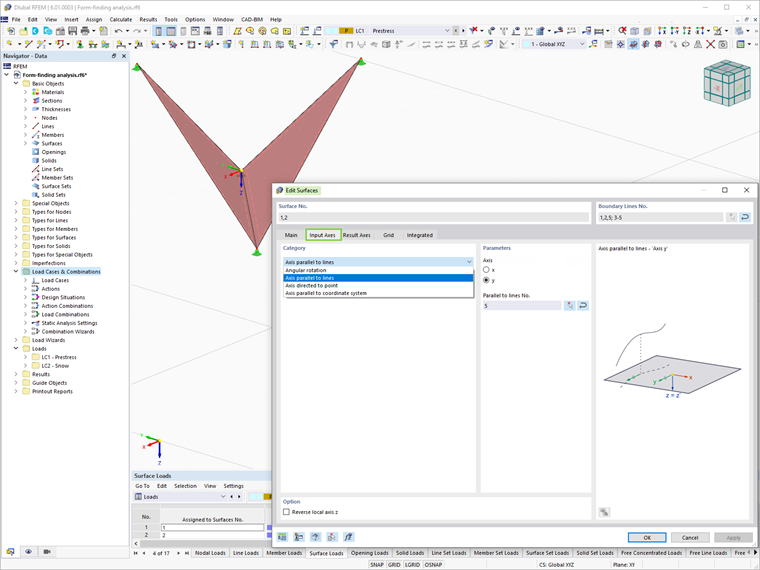
Important : pour l’introduction d'une précontrainte orthotrope de surface, cochez la case axes spécifiques dans la boite de dialogue « Modifier la surface » et ajustez les paramètres d’entrée de la surface en conséquence.
Charge de surface - Méthode standard
La méthode standard décrit un vecteur qui peut se déplacer librement dans l’espace jusqu’à la position cible.
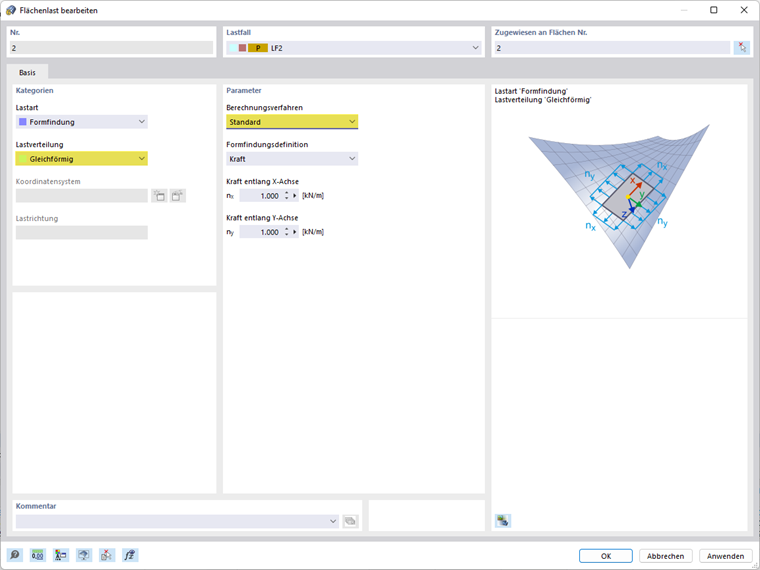
Charge de surface - Méthode standard
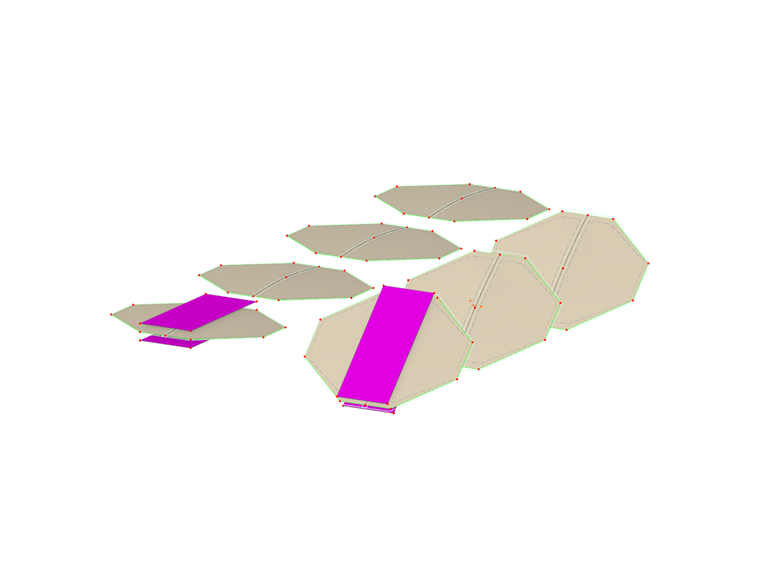
Avec la définition de la flèche, vous pouvez spécifier la flèche d’une membrane, et ainsi modéliser des coussins. Spécifiez jusqu’où la surface peut dévier, et la définition de force associée est déterminée automatiquement de manière itérative. Définissez seulement un rapport des forces en nx et ny.
Le flèche peut se référer aux plans imaginaires suivants :
- Base
- Système de coordonnées
- Surface
La base se réfère à la surface elle-même. Le plan de base est utilisé. Pour une surface courbée, il s’agit généralement des bords supportés.
Le système de coordonnées se réfère à un système de coordonnées défini. L’axe Z (pour un système de coordonnées pivoté, l’axe W) est ici prépondérant. Le flèche est mesuré en tant que portée de la surface à l’axe.
Le flèche peut également être défini par rapport à une autre surface.
Dans le modèle suivant, différentes modélisations sont présentées.
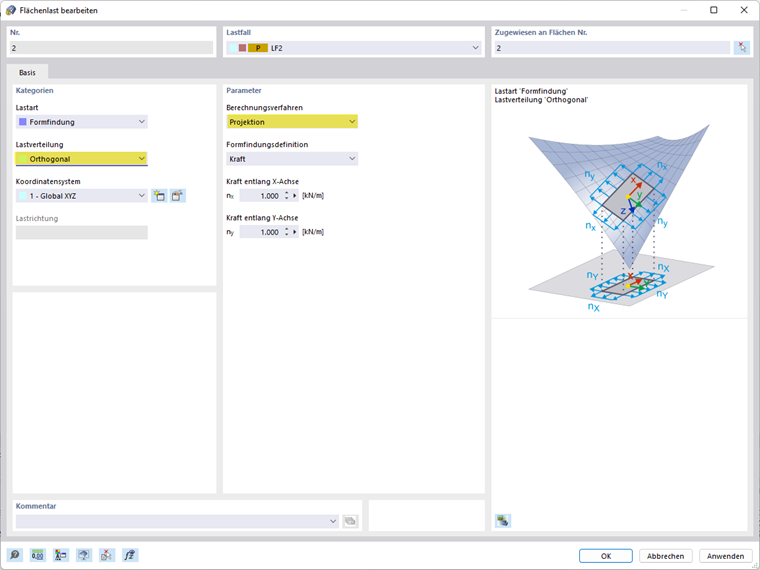
Charge de surface - Méthode de projection
La méthode de projection peut être définie orthogonalement ou radialement dans RFEM 6.
Pour comparer la méthode de projection orthogonale et radiale, un fichier de modèle est fourni.
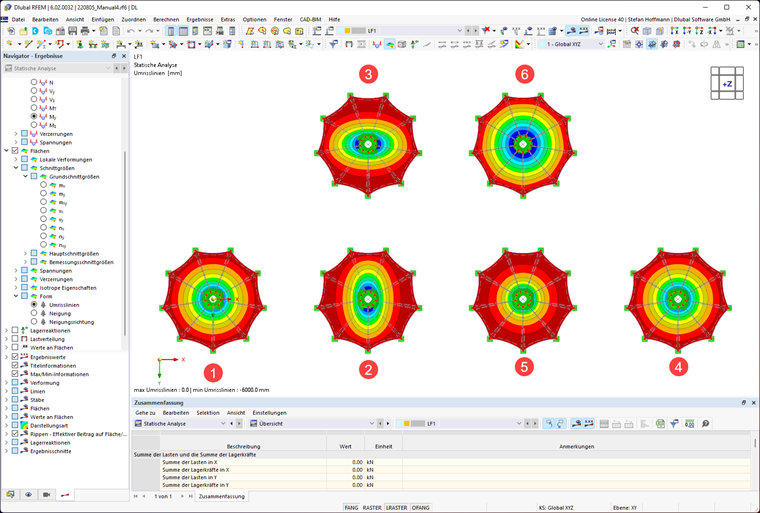
Les charges de surface sont définies comme suit :
| Numéro | Distribution de la charge | Définition de la force [kN/m] | Définition de la force [kN/m] | Forme | Raison |
|---|---|---|---|---|---|
| 1 | Orthogonale | nx = 2 | ny = 2 | Circulaire | même précontrainte en X et Y |
| 2 | Orthogonale | nx = 2 | ny = 10 | Elliptique | précontrainte plus élevée en Y |
| 3 | Orthogonale | nx = 10 | ny = 2 | Elliptique | précontrainte plus élevée en X |
| 4 | Radiale | nr = 2 | nt = 2 | Circulaire | même précontrainte en r et t |
| 5 | Radiale | nr = 2 | nt = 10 | Circulaire, cône fort | précontrainte plus élevée en t |
| 6 | Radiale | nr = 10 | nt = 2 | Circulaire, cône faible | précontrainte plus élevée en r |
Charge de surface - Méthode de projection orthogonale
La méthode de projection orthogonale décrit un vecteur partiellement mobile dans l’espace et fixé aux coordonnées globales XY.
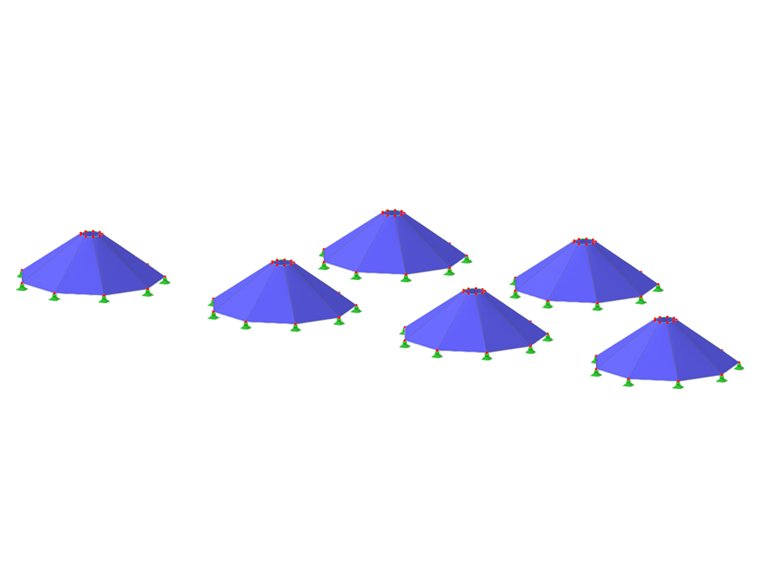
Charge de surface - Méthode de projection radiale
La méthode de projection radiale décrit un vecteur partiellement mobile dans l’espace et fixé aux axes radiaux et tangentiels définis.
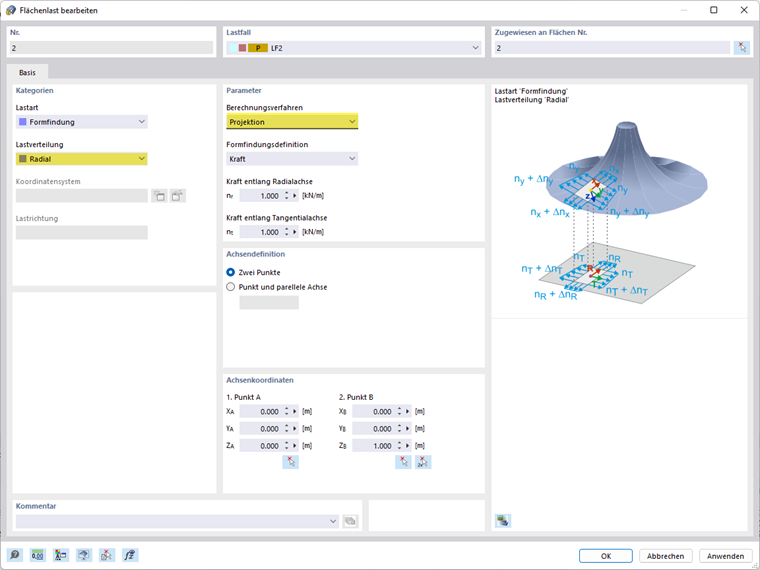
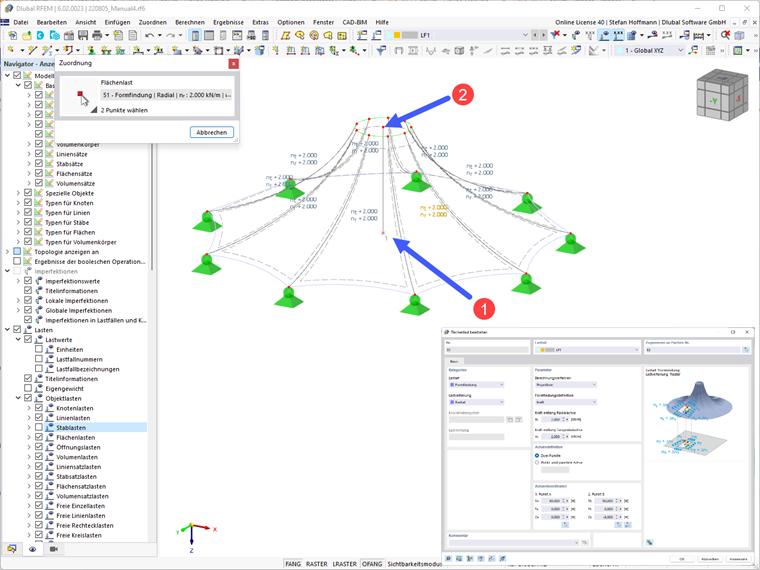
Pour la méthode de projection radiale, définissez l’axe. Vous pouvez facilement capturer 2 points dans votre modèle à l’aide du bouton
![]() . Il s’agit généralement d’un axe vertical au centre de votre membrane conique.
. Il s’agit généralement d’un axe vertical au centre de votre membrane conique.
Charges de solide
Les charges de solide du type de charge Gaz peuvent être définies selon différents comportements du gaz.

Charges de solide - Type de charge Gaz
Le type de charge Gaz permet de définir la forme selon les comportements de gaz suivants :
- Surpression résultante (po)
- Augmentation de la surpression (Δpo)
- Volume résultant (V)
- Augmentation de volume (ΔV)
Les abréviations sont définies comme suit :
{|
|+Volume de gaz
!Abréviation
!Désignation
|-
|p
|Pression de gaz
|-
|pp
|Pression initiale du gaz (pression atmosphérique)
|-
|po
|Surpression du gaz
|-
|Δpo
|Augmentation de la surpression du gaz
|-
|pa
|Pression actuelle du gaz (équivaut à pp sans état initial/état de construction)
|-
|V
|Solide de gaz
|-
|Va
|Volume actuel de gaz
|-
|ΔV
|Augmentation du volume
|-
|T
|Température du gaz
|-
|Tp
|Température initiale du gaz
|-