






Obliczenia nieliniowe ogólnie prowadzą do układu nieliniowych równań algebraicznych, które muszą być rozwiązane. Solidność nieliniowego solvera jest kluczowym elementem procesu obliczeniowego w ramach analizy metodą elementów skończonych. Metoda nieliniowa przekształca nieliniowy problem w sekwencję problemów liniowych, które są następnie rozwiązywane przez solver liniowy. Istnieje sześć dostępnych metod rozwiązywania nieliniowego, algebraicznego układu równań.
Newton-Raphson
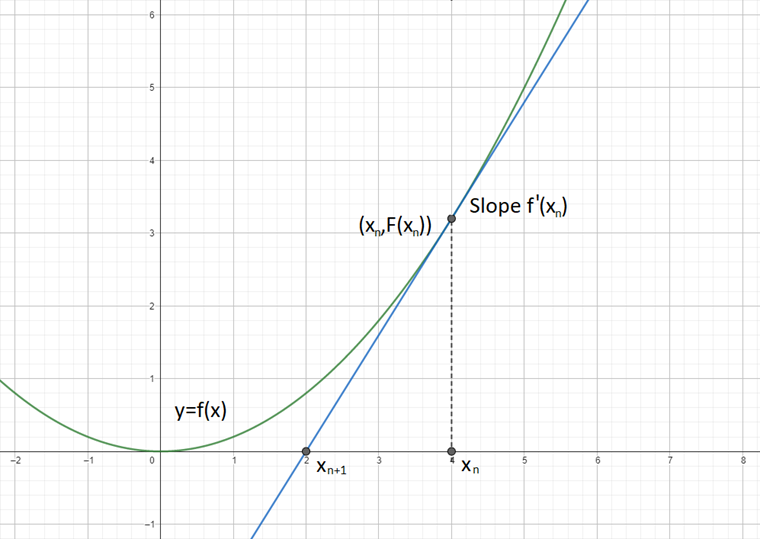
Metoda nieliniowa Newtona-Raphsona jest preferowana w przypadku ciągłej prawej strony. W tej metodzie macierz sztywności stycznej jest obliczana jako funkcja aktualnego stanu deformacji i odwracana w każdym cyklu iteracyjnym. W większości przypadków metoda ta charakteryzuje się szybkim (kwadratowym) zbieżnością.
Picard
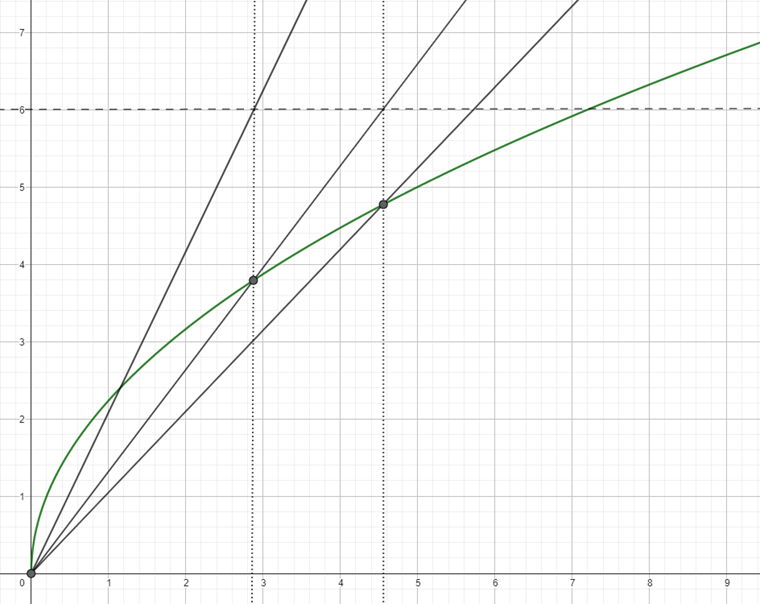
W przypadku dyskontynuacji, metoda Picarda może być używana jako bardziej solidny wybór. Metoda ta jest również znana jako metoda iteracji punktu stałego lub metoda siecznych. Można ją traktować jako aproksymację różnic skończonych metody Newtona. Różnica jest rozważana między bieżącym cyklem iteracyjnym a początkowym cyklem iteracyjnym w bieżącym kroku obciążenia. Metoda ta ogólnie nie jest zbieżna tak szybko jak metoda Newtona, ale może być bardziej solidna dla niektórych problemów nieliniowych.
Newton–Raphson połączona z Picard
Ideą tej metodologii kombinacyjnej jest połączenie zalet obu metod. Dla początkowej aproksymacji używana jest metoda Picarda, aby uniknąć początkowych niestabilności. Następnie stosowana jest szybka metoda Newton-Raphson. Razem można osiągnąć solidną i stosunkowo szybką aproksymację.
W ustawieniach można zdefiniować proporcje odpowiednich metod.
Newton-Raphson z Stałą Macierzą Sztywności
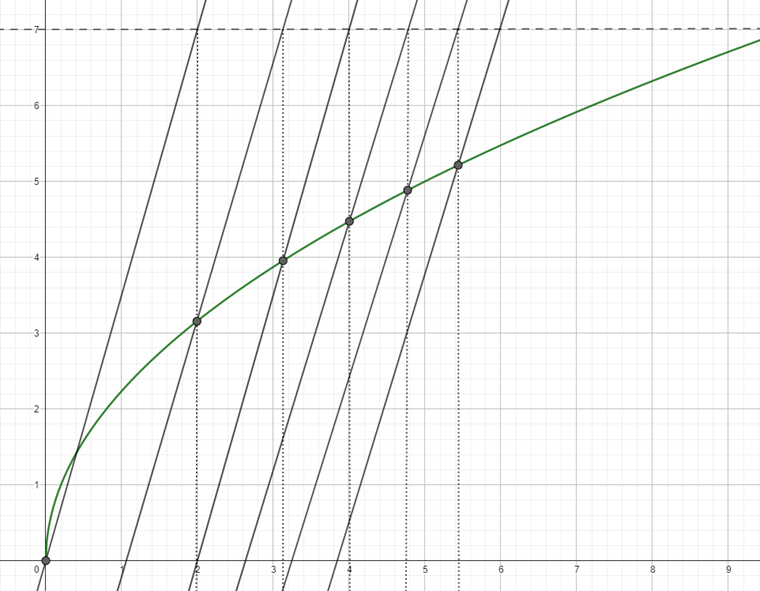
Ta wersja metody Newton-Raphson może być wybierana do obliczeń zgodnie z analizą dużych deformacji. Macierz sztywności tworzona jest tylko raz w pierwszym kroku iteracyjnym, a następnie jest używana we wszystkich kolejnych pętlach obliczeniowych (dlatego stała). W ten sposób obliczenia przebiegają szybciej, ale nie są tak stabilne jak obliczenia zgodnie z normalną lub zmodyfikowaną metodą Newton-Raphson.
Dla mniejszych stopni swobody metoda Newton-Raphson zwykle okazuje się bardziej efektywna. Dla małych zmian nachylenia w funkcji metoda Stałej Sztywności ma na ogół przewagę. Jeśli nachylenie doświadcza drastycznych zmian, jednak zazwyczaj zaleca się metodę Newton-Raphson.
Zmodyfikowana metoda Newton-Raphson
Ta metoda jest używana do przeprowadzania analizy pokrytycznej, w której należy pokonać zakres z niestabilnością. Jeśli dostępna jest niestabilność i macierz sztywności nie może być odwrócona, program używa macierzy sztywności z ostatniego stabilnego kroku iteracyjnego. Program kontynuuje obliczenia z tą macierzą, aż ponownie zostanie osiągnięty zakres stabilności.
W porównaniu do (zwykłej) metody Newton-Raphson, Zmodyfikowana metoda Newton-Raphson ma tendencję do zbieżności wolniejszej (liniowej) z większą ilością, ale obliczeniowo tanich iteracji i jest bardziej solidna przy ekstremalnych nieliniowościach (jak kruche pękanie), gdzie metoda Newton-Raphson może zawieść.
Relaksacja Dynamiczna
Ostateczna metoda jest odpowiednia do obliczeń zgodnie z analizą dużych deformacji oraz do rozwiązywania problemów związanych z analizą pokrytyczną. W tym podejściu wprowadzany jest sztuczny parametr czasu. Biorąc pod uwagę bezwładność i tłumienie, awaria może być traktowana jako problem dynamiczny. Podejście to używa metody jawnej integracji czasowej; macierz sztywności nie jest odwracana. Żadna część modelu nie może mieć konkretnej wagi zero przy obliczeniach z relaksacją dynamiczną. Metoda ta obejmuje tłumienie Rayleigha, które można zdefiniować za pomocą stałych α i β zgodnie z następującym równaniem z pochodnymi czasowymi:
|
M |
Concentrated (diagonal) mass matrix |
|
C |
Diagonal damping matrix |
|
K |
Stiffness matrix |
|
f |
Vector of external forces |
|
u |
Discretized displacement vector |