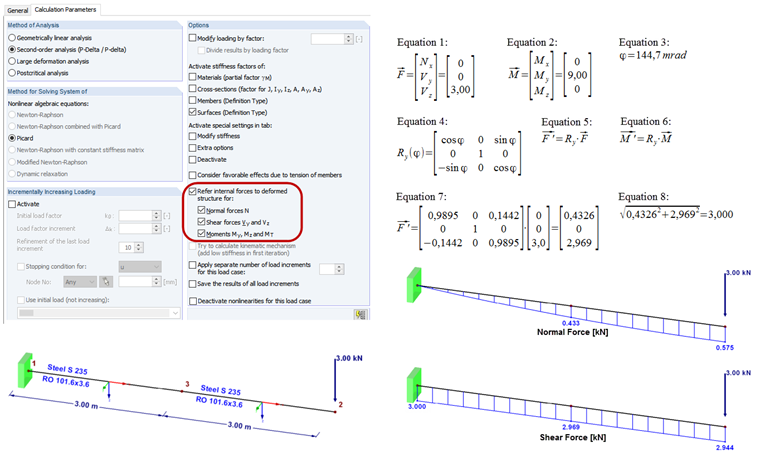
W Parametrach obliczeniowych programu RFEM i RSTAB dla każdej kombinacji obciążeń i każdego przypadku obciążenia dostępna jest opcja "Odnieść siły wewnętrzne do konstrukcji odkształconej". Wymaga to obliczeń zgodnie z teorią drugiego rzędu.
Znaczenie tego zostanie wyjaśnione na prostym przykładzie wspornika poddanego obciążeniu (patrz ilustracja).
Obciążenie wspornika powoduje niewielki obrót w węźle 3. W przypadku obliczeń według teorii drugiego rzędu opcja ta umożliwia określenie, czy siły wewnętrzne w tym węźle odnoszą się do oryginalnego czy obróconego układu współrzędnych. Podczas obliczania układu konstrukcyjnego zgodnie z geometryczną analizą liniową, uzyskuje się następujące siły wewnętrzne (RO 101,6 × 3,6, S235):
Nx = 0
Vy = 0
Vz = 3,00 kN
Mx = 0
My = 9,00 kNm
Mz = 0
W każdym przypadku siły i momenty można traktować jako wektory (Wzór 1 i Wzór 2). W węźle 3 następuje obrót zgodny ze wzorem 3.
W ten sposób lokalny układ osi pręta zostaje obrócony w tym miejscu o kąt φy. Teraz należy przekonwertować siły wewnętrzne na obrócony układ współrzędnych. Odbywa się to poprzez pomnożenie wektora przez macierz obrotu (patrz link poniżej tego FAQ). Macierz obrotu względem osi y jest pokazana we wzorze 4. Do konwersji stosuje się Formuły 5 i Formuły 6. Wstawiając liczby, otrzymujemy Wzór 7.
Okazuje się, że niewielka część siły tnącej staje się siłą rozciągającą:
Nx = 0,4326 kN
Vy = 0
Vz =2,969 kN
Wektor momentu pozostaje niezmieniony.
W tym prostym przypadku można sprawdzić obliczenia zgodnie z wzorem 8.
To wyjaśnia, do czego służy ta opcja obliczeń. Ale jakie są „prawidłowe” siły wewnętrzne? W każdym razie siły wewnętrzne odnoszące się do obróconego układu współrzędnych są dokładniejsze. Jednak obliczenia zgodnie z teorią drugiego rzędu wymagają niewielkich obrotów. Wyniki nie mogą się zatem znacząco różnić. Jeżeli tak, konieczne jest przeprowadzenie obliczeń według analizy dużych deformacji. W takim przypadku dozwolone są duże obroty, a wyniki są zawsze odniesione do obróconego układu współrzędnych. W przypadku obliczeń według liniowej analizy geometrycznej siły wewnętrzne są zawsze odniesione do oryginalnego układu współrzędnych.