






Obecné
Každá uzlová podpora má vlastní lokální osový systém. Osy se označují jako X', Y' a Z'. Standardně se lokální osový systém podpory řídí globálním systémem os v daném modelu v programu RFEM nebo případně RSTAB. Lze ovšem definovat vlastní souřadný systém nebo jednoduše natočení. V našem příkladu zapneme zobrazení osových systémů u všech uzlových podpor.
Jednotlivé možnosti zadání nelinearity si ukážeme v případě pootočení okolo osy Y'. Obdobné možnosti ovšem platí i ve směru obou zbývajících os podpory. Určení kladného směru rotace se řídí pravidlem pravé ruky.
Pozor: Nelinearita se vždy vztahuje na působící podporovou sílu.
Neúčinnost, je-li MY' záporné
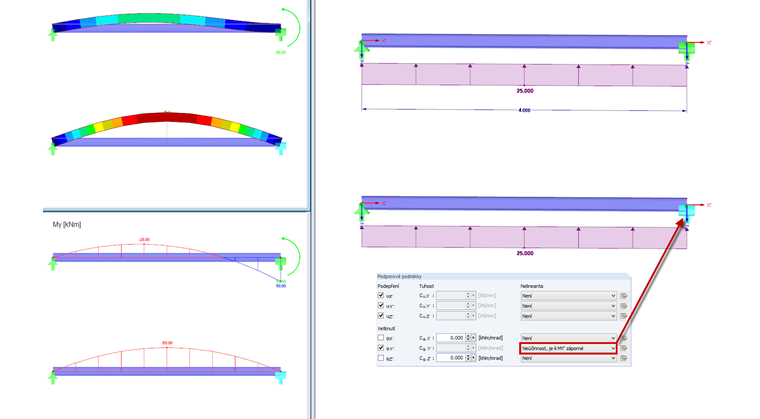
Osa Y' směřuje k nám. Levotočivý podporový moment je tak kladný. Vnesené zatížení vyvolává v podpoře pravotočivý podporový moment, a proto je moment v podpoře záporný.
Neúčinnost, je-li MY' kladné
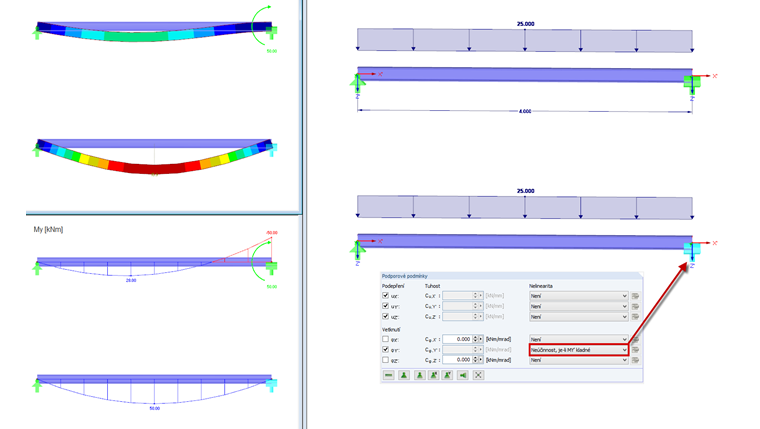
Osa Y' směřuje k nám. Levotočivý podporový moment je tak kladný. Vnesené zatížení vyvolává v podpoře levotočivý podporový moment, a proto je moment v podpoře kladný.
Částečná účinnost: Prokluz
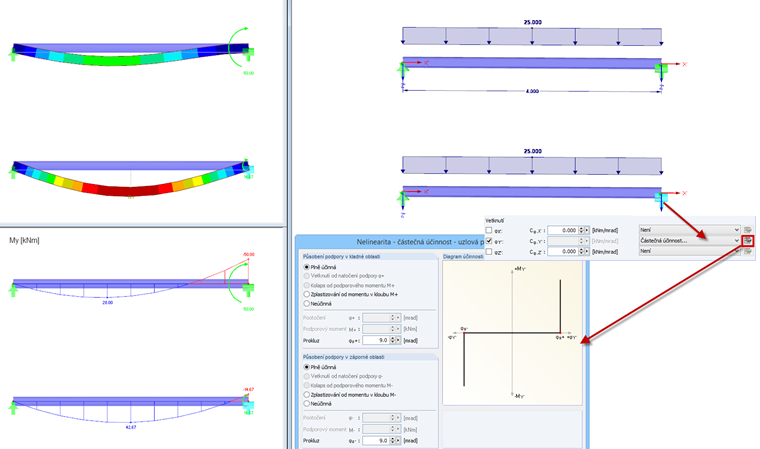
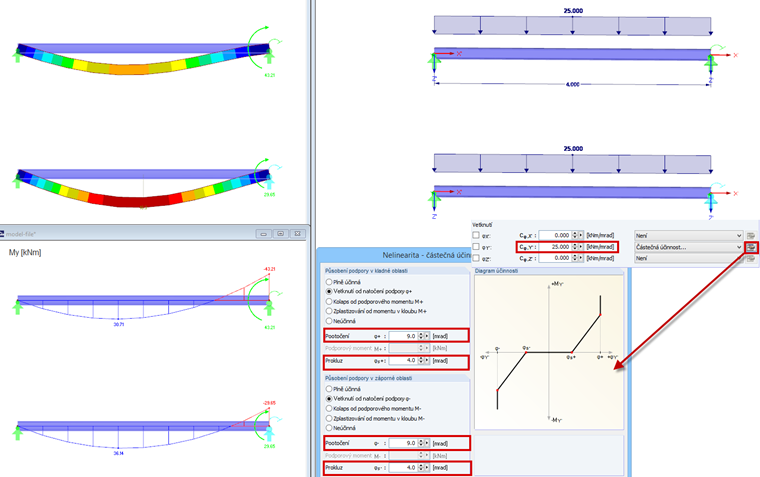
Částečnou účinnost lze zadat v přídavném dialogu. Můžeme přitom samostatně definovat působení podpory v kladné oblasti (kladný podporový moment MY' a kladné pootočení φY') a působení podpory v záporné oblasti (záporný podporový moment MY' a záporné pootočení φY'). Nastavení se pak graficky znázorní v diagramu.
Jestliže jsme podporu definovali jako „pevnou“ pro otáčení okolo Y', bude se v případě zadání „plné účinnosti“ a „prokluzu“ uzlová podpora otáčet až do dosažení stanoveného prokluzu. Poté bude působící podporový moment plně přenášen. Pokud jsme zadali pružinu, bude pružina působit po dosažení zadaného prokluzu.
Částečná účinnost: Tečení a prokluz
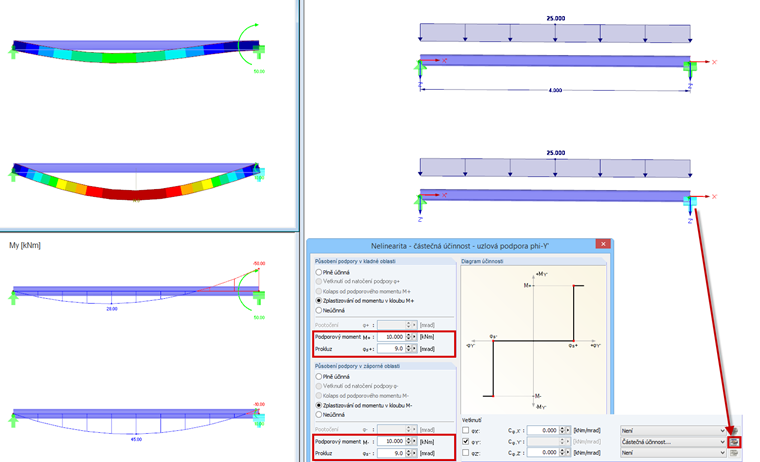
Jestliže nastavíme tuto volbu, můžeme zadat mezní podporový moment a hodnotu pro prokluz. I v tomto případě lze údaje definovat zvlášť pro kladnou a pro zápornou oblast. Jakmile pootočení přesáhne stanovený prokluz, může podpora maximálně přenášet zadaný mezní podporový moment. Jestliže působící podporový moment překročí mezní podporový moment, pootočení se dále zvětšuje, aniž by se již dále zvyšoval podporový moment.
Částečná účinnost: Pružina a prokluz
Pokud jsme u podpory zadali konstantu tuhosti, bude pro „částečnou účinnost“ k dispozici další volba „Vetknutí od natočení podpory φ+“. Pro prokluz lze, jak jsme již popsali, stanovit mezní hodnotu. Spolu s mezní hodnotou „pootočení“ se tak definuje rozmezí účinnosti zadané pružiny. Mezní hodnotou „prokluzu“ a mezní hodnotou „pootočení“ se stanoví oblast účinnosti lineární rotační pružiny. Jestliže pootočení překročí mezní hodnotu „pootočení“, bude se podporový moment plně přenášet, aniž by se pootočení nadále zvětšovalo. Stejně jako u ostatních možností lze účinnost podpory definovat samostatně pro kladnou a pro zápornou oblast.
Částečná účinnost: Kolaps od momentu
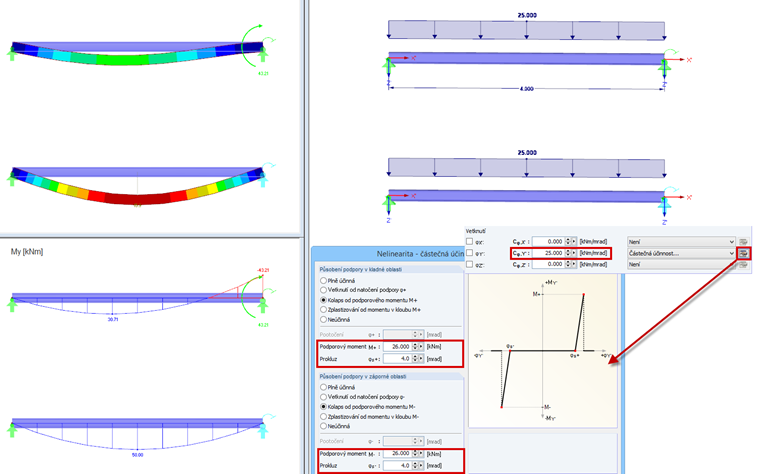
Jestliže jsme u podpory zadali konstantu tuhosti, můžeme definovat také „Kolaps od podporového momentu M+“. Také tuto volbu lze kombinovat s prokluzem. Podporový moment roste v závislosti na konstantě rotační tuhosti až do dosažení stanoveného mezního podporového momentu. Při jeho překročení náhle podpora ztratí pro daný směr účinnost.
V našem dalším příspěvku se budeme věnovat zbývajícím možnostem.