该结构通过支座将其荷载传递到基础上。没有支承的话,所有节点都是自由的,无拘无束地移动和转动。若要让节点充当支承,必须至少限制一个自由度或通过弹簧进行限制。此外,节点必须是杆件的一部分。
只有对于适当支撑的节点,才可能发生节点的强迫变形。
如果您希望为节点支座分配非线性属性,您可以定义拉或压失效标准、破裂和屈服或工作和刚度图表。
自定义节点支座的名称符号标识保持的自由度。以下支座类型已定义:
- 铰接
- 固定
- 可移动
- 沿 X' 可移动
- 沿 Y' 可移动
基础
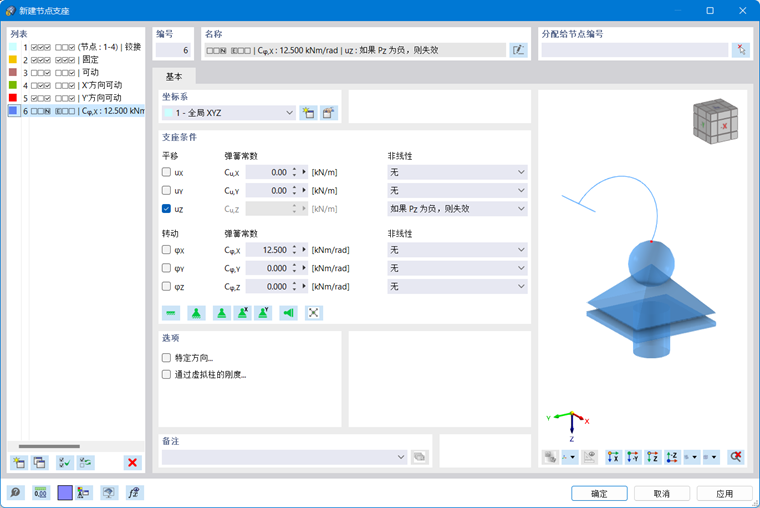
基础选项卡管理基本支座参数。
坐标系
每个节点支座都有一个局部坐标系。默认情况下,它与全局 X、Y 和 Z 轴平行对齐。如果您创建了一个自定义坐标系或使用按钮
![]() 定义了一个坐标系,您也可以使用该参考系。
定义了一个坐标系,您也可以使用该参考系。
支承条件
支承条件分为“平动”和“旋转”自由度。平动描述支座方向上的支撑,旋转描述围绕这些轴的固定。
要定义支撑或固定,请选中相应轴的复选框。选中符号表示自由度被锁定,节点在相应方向或围绕相应方向的移动或旋转是不可能的。
如果没有支撑或固定,请取消选中相应复选框。此时,位移或旋转弹簧的常数将设为零。您可以随时调整“弹簧常数”以模拟节点的弹性支撑。在此输入过程中,弹簧刚度作为设计值输入。
在“非线性”列中,您可以专门为每个组件控制内力传递。根据自由度的不同,可以在非线性列表中选择合适的条目。
非线性工作的支座在图形中以不同颜色显示。
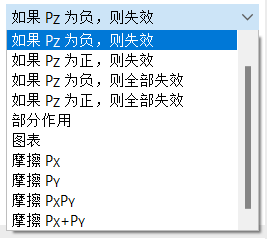
在支座力/力矩为负或正时失效
这样您可以轻松控制支座是否仅能承受正或负的力或力矩:如果一个力或力矩作用在禁止的方向上,则该支座组件失效。其余的固定和支撑仍然有效。
“负”和“正”方向是相对于施加到节点支座上的力或力矩而言(注意:这些不是来自支座的反作用力)。符号基于全局轴的方向:例如,如果全局 Z 轴向下,则荷载工况“自重”将导致正的支座力 PZ。
在所有支座力/力矩为负或正时失效
与上述单一组件失效不同,一旦该组件无效,整个支座完全失效。
如果选择其他非线性,可以在 部分活动、图表 或 摩擦 选项卡中定义参数。
选项
通过该部分的复选框,您可以为节点支座设置其他属性。根据选择,添加特定方向或通过虚拟支柱确定刚度选项卡。
特定方向
特定方向选项卡提供将支座旋转的功能,因此不必创建自定义坐标系。
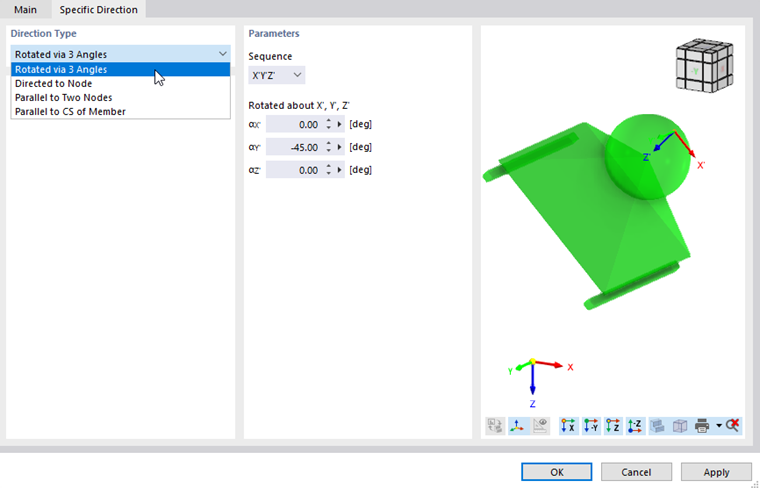
方向类型
有多种方法可用于调整支座的方向:您可以绕支座轴 X'、Y' 和 Z' 旋转,使其对准一个或两个节点,或与一个杆件平行排列。为此,您可以使用按钮
![]() 图形选择对象。
图形选择对象。
通过虚拟支柱确定刚度
特别推荐在二维结构的点支撑中使用通过虚拟支柱确定刚度选项卡。您可以在此处使用模型中未表示的支柱参数来计算支座弹簧常数。根据边界条件,RSTAB 确定支座的弹簧刚度。这种建模比节点中的固定支撑更接近现实。
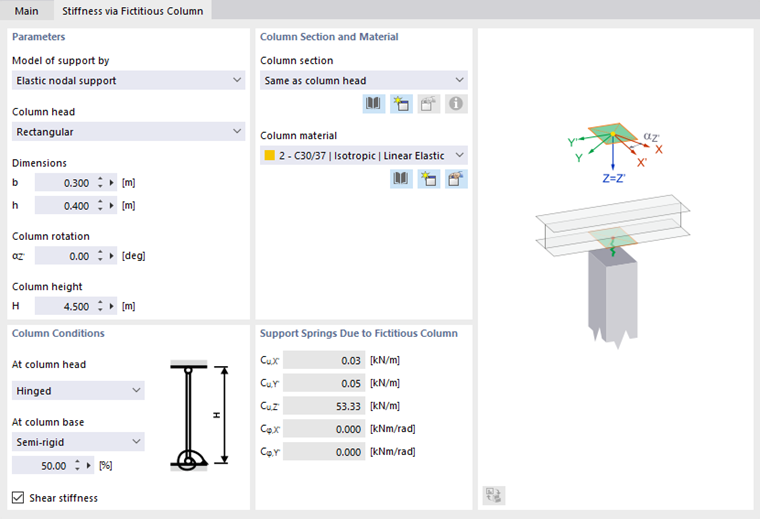
参数
作为“支座模型”,使用了弹性节点支座。位移和旋转弹簧的刚度取决于您在此选项卡中设定的支柱的几何和材料数据。
可以用矩形或圆形描述“支柱顶部”的几何形状,选择性地对支柱进行旋转。
“支柱高度”影响位移和旋转弹簧的常数。
支柱截面和材料
为了确定弹簧刚度,需要支柱的截面和材料属性。如果支柱与“支柱顶部”不同形(既非矩形也非圆形),您可以在列表中选择或定义适当的支柱截面。
在列表中选择“支柱材料”。使用按钮
![]() 和
和
![]() 可以创建新材料。
可以创建新材料。
支柱条件
支柱顶部和支柱底部的支撑类型影响位移和旋转弹簧的确定。列表中提供以下选项:
- 铰接
- 半刚性
- 刚性
在“半刚性”选项中,您可以以百分比表示支柱底部的固定程度。
默认情况下,在刚度计算中会考虑支柱的“剪切刚度”。
由于虚拟支柱导致的支座弹簧
本节列出了由支柱的几何和材料特性决定的支座弹簧常数。这些值被输入到“基础”选项卡中。
部分活动
部分活动作为支座非线性属性的一部分可用(参考图像选择支座非线性)。
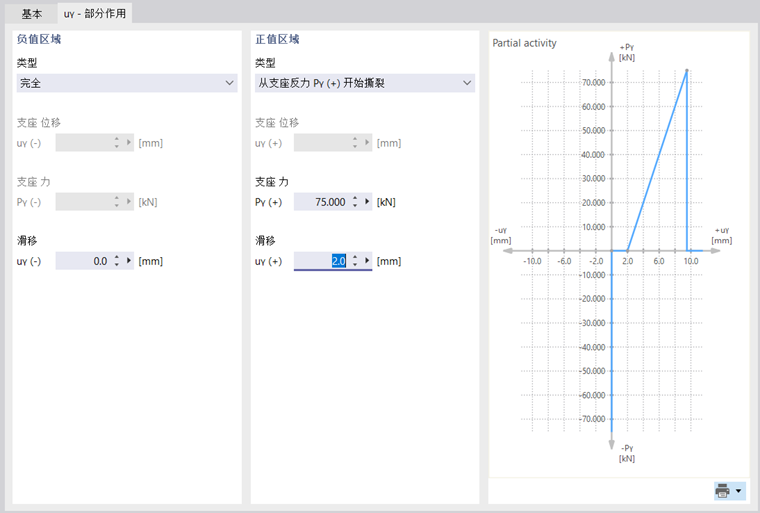
在负区域和正区域中定义支座的作用。符号规则在失效部分中有所解释。在“类型”列表中提供了用于选择支座作用效果的不同标准。
- 完整:支座组件完全有效。
- 作用从支座位移/支座旋转开始:位移或旋转弹簧的刚度仅在特定位移或旋转范围内有效。超出范围时,支座固定或嵌入有效。
- 从支座力/力矩开始破裂:支座仅在某一特定力或力矩范围内有效。超出范围时,支座失效。
- 从支座力/力矩开始屈服:支座仅在某一特定力或力矩范围内有效。超出范围时,变形增加,但应力不再增加。
- 故障:支座组件无效。
大多数支座类型可以与一种“滑移”结合使用,从而使支座在某个特定位移或旋转后才有效。
图表
图表是作为支座的非线性属性的一部分可用的选项(参考图像选择支座非线性)。
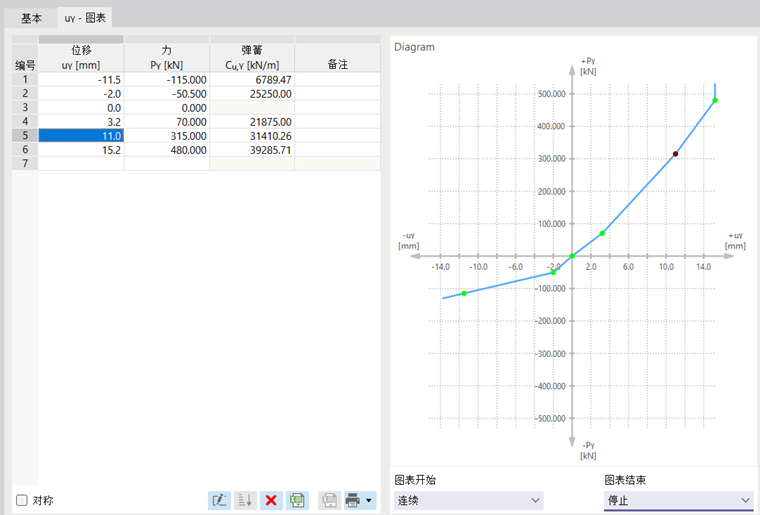
在“位移”或“旋转”列中定义工作图表定义点的数量及其相应的值。在“力”或“力矩”列中,然后可以为位移或旋转的横坐标值分配支座力或力矩。
通过按钮
![]() 可以从 Excel 表中导入图表。如果定义点的顺序不正确,可以使用按钮
可以从 Excel 表中导入图表。如果定义点的顺序不正确,可以使用按钮
![]() 升序排序。
升序排序。
对于“图表开始”和“图表结束”,以下标准可供选择:
- 破裂:支座仅在力或力矩的最大值范围内有效。超过此范围时,支座失效。
- 屈服:支座仅在力或力矩的最大值范围内有效。超过此范围时,变形增加,但应力不再增加。
- 连续:在定义区域之外使用最后一个步骤的弹簧常数。
- 挡块:允许的变形限于最大位移或旋转。一旦超出范围,固定支座或嵌入将有效。
刚度图表
刚度图表作为支座的非线性属性,对于旋转支座可用。
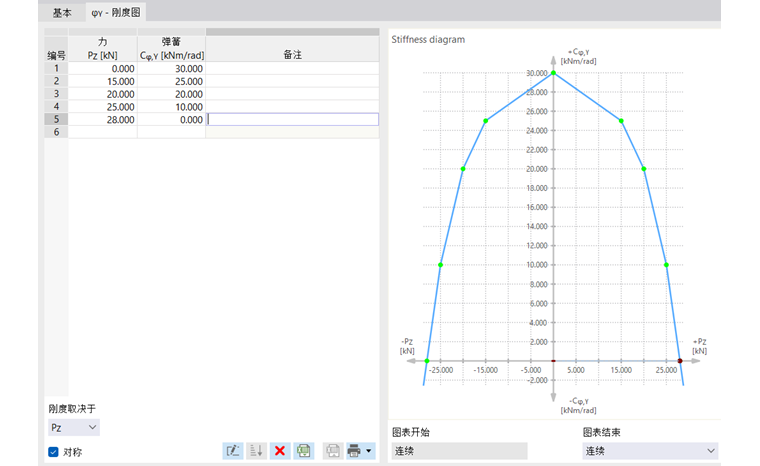
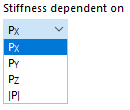
首先在“依赖于”的列表中(选项卡下方)设置支座力的组成部分,该力将决定弹簧刚度。选项|P| 代表支座的合力。
然后在“力”列中,定义工作图表定义点的数量及其对应值。在“弹簧”列中,分配相应的弹簧常数。
对于“图表开始”和“图表结束”,以下标准可供选择:
- 破裂:支座仅在力的最大值范围内有效。超过此范围时,支座失效。
- 屈服:支座仅在力的最大值范围内有效。超过此范围时,变形增加,但应力不再增加。
- 连续:在定义区域之外使用最后一个步骤的弹簧常数。
摩擦
在“非线性”列表中提供了四种方法,以定义转换支座的摩擦与另一支座组件的依赖关系(参考图像选择支座非线性)。
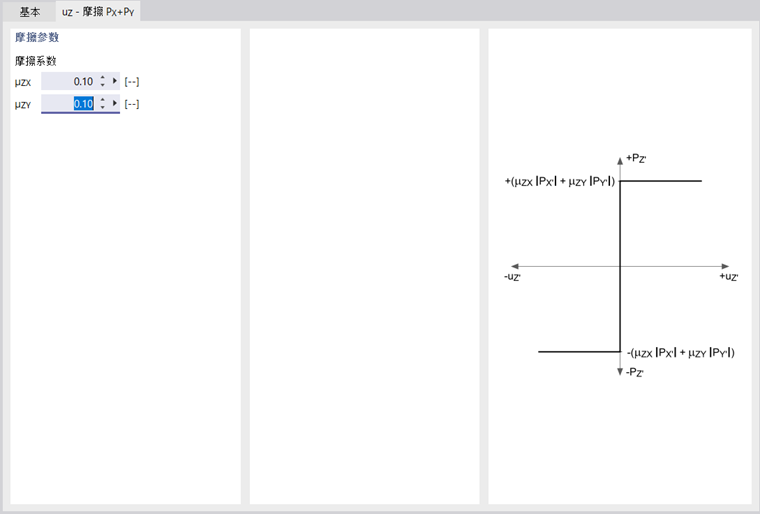
传递的支座力与另一方向上的压力联系起来。根据“基础”选项卡的选择,摩擦可以仅依赖于一个支座力,或者同时依赖于两个同时作用的支座总力。支座力和摩擦力之间的关系如下:
在FAQ 003537中解释了如何在节点支座中考虑摩擦。
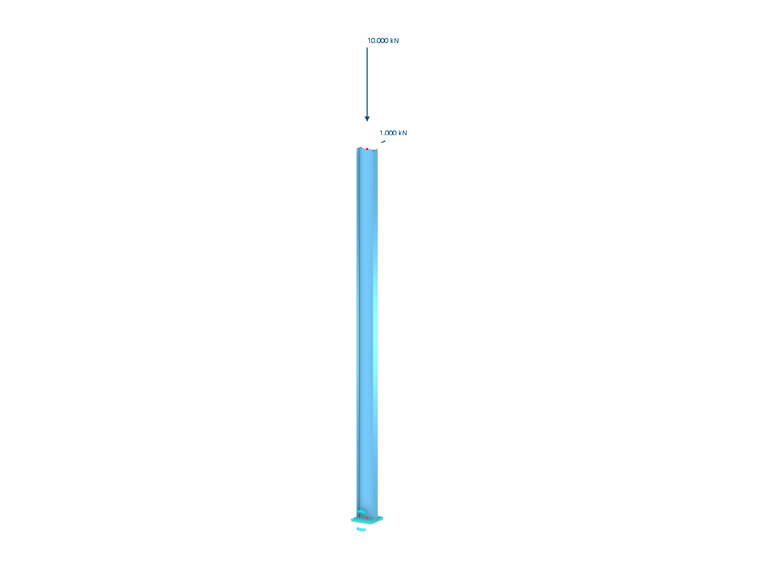
下面的支柱模型显示了通过摩擦传递水平力的支座。水平力不得超过垂直力的 10%。在 LF 1 中,此条件得到满足。 在 LF 2 中,由于水平力过大,模型变得不稳定。
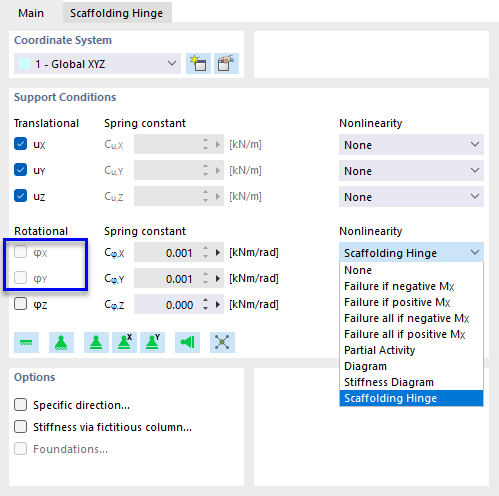
脚手架铰链
脚手架铰链作为支座的非线性属性适用于旋转自由度 φX 和 φY。可用于定义临时结构如操作脚手架或建筑支柱的总支座。
在“脚手架铰链”选项卡中,您可以定义 M-φ 工作图表。参数在产品功能脚手架支座中详细描述。