






A categoria de tabela de resultados Frequências naturais contém as frequências naturais do sistema não amortecido. Na barra de título da tabela, pode alternar entre os resultados dos casos de carga modal.

Cada frequência do sistema tem um modo próprio correspondente. As formas próprias também são apresentadas graficamente (ver figura # extbookmark manual|image027573|Resultados da análise modal #). Seleccione o modo próprio no navegador ou utilize os botões
![]() e
e
![]() para alternar entre os modos (ver figura # extbookmark manual|image027595|Selecionar o modo forma nº). Também pode selecionar a linha correspondente na tabela para exibir uma forma de modo específica na janela de trabalho.
para alternar entre os modos (ver figura # extbookmark manual|image027595|Selecionar o modo forma nº). Também pode selecionar a linha correspondente na tabela para exibir uma forma de modo específica na janela de trabalho.
Frequências naturais
A tabela 'frequências naturais' (ver imagem image027927 categoria de resultados 'frequências naturais' ) oferece uma visão geral dos seguintes resultados para o sistema sem amortecimento:
- Valores próprios
- frequência angular
- Frequência natural
- Período próprio
A equação de movimento de um sistema de graus de liberdade múltiplos sem amortecimento é dada com o # extbookmark manual especificado|eigenvalue-solver|Método de solução # calculado.
M depende do tipo de # extbookmark manual|mass-matrix|Matriz de massa nº.
|
uj |
Componente de translação (j é a direção X/Y/Z) |
|
𝜑j |
Componente de rotação (j é a direção X/Y/Z) |
O valor próprio λ [1/s²] está ligado à frequência angular ω [rad/s] com λi = ωi2. A frequência natural f [Hz] é então derivada com f = ω/(2π). O período natural T [s] é o inverso da frequência, que é determinada com T = 1/f.
Para um sistema com vários graus de liberdade (MDOF) existem vários valores próprios λi e modos próprios associados ui .
Massas modais efetivas

O separador 'Massas modais efetivas' contém uma visão geral dos seguintes resultados:
- Massa modal Mi
- Massa modal efetiva para direções de translação meX, meY, meZ
- Massa modal efetiva para direções de rotação meφX, meφY, meφZ
- Fator de massa modal efetiva para as direções de translação fmeX, fmeY, fmeZ
- Fator de massa modal efetiva para direções de rotação fmφX, fmφY, fmφZ
- Somas de resultados
As massas modais efetivas descrevem quanta massa é ativada em cada direção por cada modo próprio do sistema.
A massa modal é definida da seguinte forma:
O vetor próprio ui de um modo próprio i é mostrado na equação fórmula001058 modos próprios . M depende do tipo de # extbookmark manual|mass-matrix|Matriz de massa nº.
A massa modal Mi é independente da direção. No entanto, isso muda dependendo da escala de das formas próprias .
As massas modais efetivas mijeff descrevem as massas que são aceleradas na direção j, onde j = 1, 2, 3 para translação ej = 4, 5, 6 para rotação - para cada modo próprio individual. Essas massas são independentes da escala das formas próprias . Estão diretamente relacionados com os TABLE_PARTICIPATION_FACTORS fatores de participação Γi, j (ver equação fórmula001060 fator de participação ).
|
X, Y, Z |
Coordenadas globais do nó de EF em questão |
|
X0, Y0, Z0 |
Coordenadas do centro de gravidade |
A matriz T existe para cada nó de EF.
As massas modais efetivas são definidas da seguinte forma:
A soma das massas modais efetivas ∑me é dada no final da tabela. Nas direções de translação, estas somas são iguais à massa total da estrutura ∑M. As exceções são as massas que não estão ativadas, por exemplo, massas em apoios fixos. A massa total só é atingida se todos os valores próprios do modelo forem calculados.
O fator de massa modal efetivo fme é necessário para decidir se uma forma específica deve ser considerada para o método do espectro de resposta. Por exemplo, a EN 1998-1, secção 4.3.3.3 especifica que "a soma das massas modais efetivas das contribuições modais a serem consideradas é de pelo menos 90% da massa total da estrutura" e que "todas as contribuições modais são consideradas em consideração cujas massas modais efetivas são superiores a 5% da quantidade de massa total".
Os fatores de massa modal efetivos fme são definidos da seguinte forma:
Para obter mais informações sobre análise modal e fatores de massa modal efetivos, consulte Meskouris Refer [2 ] e Tedesco Consulte [3 ].
Fatores de participação
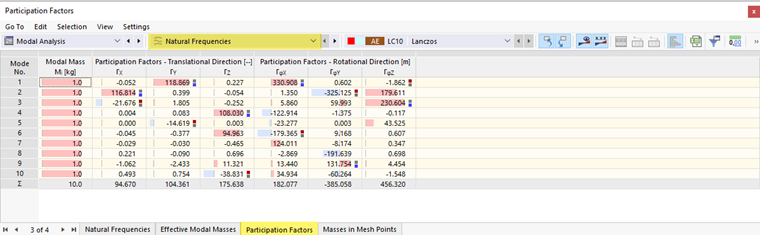
Os seguintes resultados são listados no separador 'Fatores de participação':
- Massa modal Mi
- Fator de participação para as direções de translação ΓX, ΓY, ΓZ
- Fator de participação para direções de rotação ΓφX, ΓφY, ΓφZ
- Somas de resultados
O fator de participação é definido da seguinte forma:
|
Mi |
Massa modal |
|
ui |
Vetor próprio de uma forma própria i |
|
M |
Matriz de massas |
|
Tj |
jta coluna da matriz T (transformação de eixos) |
Os fatores de participação, que também definem os graus de liberdade de rotação, são descritos em mais detalhes em Consulte [1 ]. O coeficiente de participação Γi, j é adimensional para translações; para rotações, é a unidade [m].
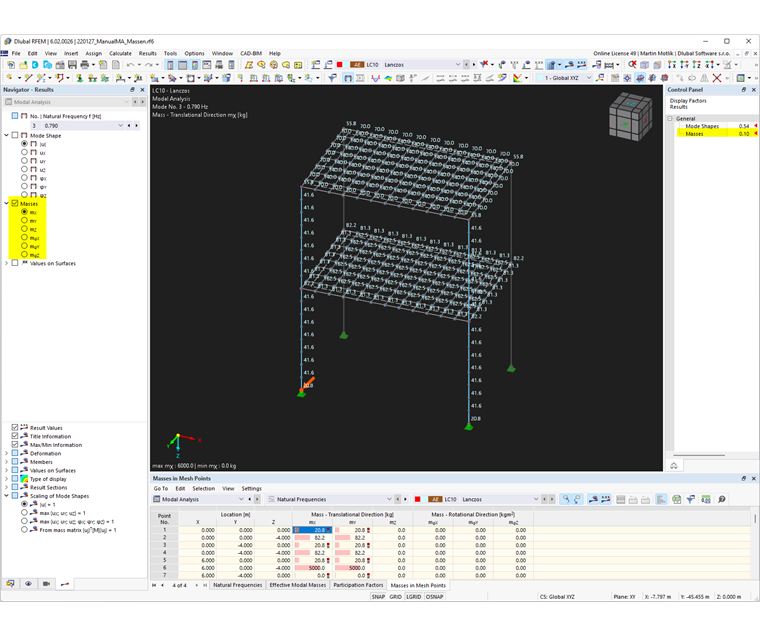
Massas em pontos de malha

No registo 'massas em pontos de rede', são listados os seguintes resultados:
- Dimensões para as direções de translação mX, mY, mZ
- Massa para as direções de rotação mφX, mφY, mφZ
- Somas de massas
Esses valores representam as massas que foram atribuídas no caso de carga de análise modal e aplicadas aos nós da malha de EF durante o cálculo. Também dependem das configurações de análise modal . Mais informações podem ser encontradas no capítulo Massas .
A soma das massas para cada direção é dada no final da tabela.
As massas podem ser representadas graficamente nos pontos da rede no modelo. Para fazer isso, utilize a categoria Massa no Navegador.
No manual # extbookmark |resultFactorsTab|# Painel de controlo permite ajustar os fatores de sobreelevação para a representação gráfica das massas.