






The Natural Frequencies result table category contains the natural frequencies of the undamped system. In the table title bar, you can switch between the results of the modal load cases.
Each frequency of the system has a corresponding mode shape. The mode shapes are also displayed graphically (see the image
Results of Modal Analysis
). Select the mode shape in the navigator or use the buttons
![]() and
and
![]() to switch between the mode shapes (see the image
Selecting Mode Shape
). You can also select the corresponding line in the table to display a particular mode shape in the work window.
to switch between the mode shapes (see the image
Selecting Mode Shape
). You can also select the corresponding line in the table to display a particular mode shape in the work window.
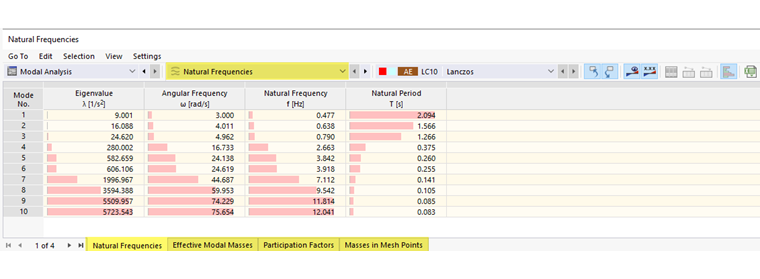
Natural Frequencies
The "Natural Frequencies" table (see the image Result Category "Natural Frequencies") provides an overview of the following results of the undamped system:
- Eigenvalue
- Angular frequency
- Natural frequency
- Natural period
The equation of motion of a multiple degree of freedom system without damping is calculated with the specified solving method .
M depends on the type of a mass matrix .
|
uj |
Translational component (j is the direction X/Y/Z) |
|
𝜑j |
Rotational component (j is the direction X/Y/Z) |
The eigenvalue λ [1/s²] is related to the angular frequency ω [rad/s] with λi = ωi². The natural frequency f [Hz] is then derived with f = ω / (2π). The natural period T [s] is the reciprocal of the frequency, which is determined as T = 1 / f.
For a structural system with more degrees of freedom (MDOF – multiple degrees of freedom), there are several eigenvalues λi and the corresponding mode shapes ui.
Effective Modal Masses
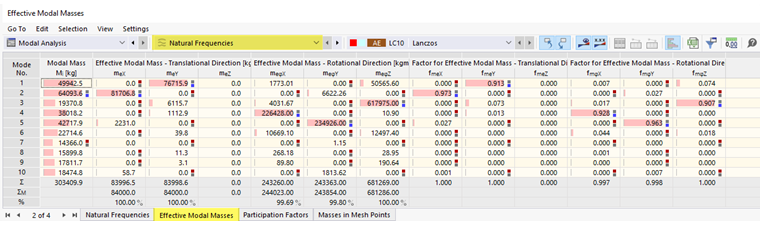
The "Effective Modal Masses" tab provides an overview of the following results:
- Modal mass Mi
- Effective modal mass for translational directions meX, meY, meZ
- Effective modal mass for rotational directions meφX, meφY, meφZ
- Effective modal mass factor for translational directions fmeX, fmeY, fmeZ
- Effective modal mass factor for rotational directions fmφX, fmφY, fmφZ
- Sums of results
The effective modal masses describe how much mass is activated in each direction by each mode shape of the structural system.
The modal mass is defined as follows:
The eigenvector ui of the mode shape i is given in the equation for Mode Shapes. M depends on the type of mass matrix .
The modal mass Mi is independent of the direction. However, it changes depending on the scaling of mode shapes.
The effective modal masses mijeff describe the masses that are accelerated in the j-direction, where j = 1, 2, 3 applies to the translation and j = 4, 5, 6 to the rotation – for each individual mode shape i. These masses are independent of the scaling of mode shapes. They are directly related to the participation factors Γi, j (see the equation Participation Factor).
|
X, Y, Z |
Global coordinates of the considered FE node |
|
X0, Y0, Z0 |
Coordinates of the center of gravity |
The matrix T exists for every FE node.
The effective modal masses are defined as follows:
The sum of the effective modal masses ∑me is given at the end of the table. In translational directions, these sums are equal to the total mass of the structure ∑M. Exceptions are masses that are not activated, such as masses in fixed supports. The full mass is only achieved if all eigenvalues of the model are calculated.
The effective modal mass factor fme is required to decide whether to consider a specific shape for the response spectrum method. For example, Section 4.3.3.3 of EN 1998‑1 specifies that "the sum of the effective modal masses for the modes taken into account amounts to at least 90% of the total mass of the structure” and that “all modes with effective modal masses greater than 5% of the total mass are taken into account."
The effective modal mass factors fme are defined as follows:
For more information about the modal analysis and the effective modal mass factors, see Meskouris [2] and Tedesco [3].
Participation Factors
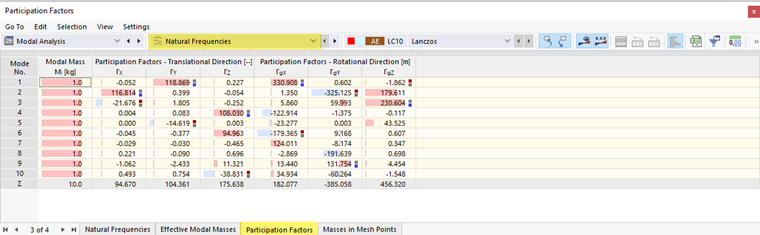
The "Participation Factors" tab lists the following results:
- Modal mass Mi
- Participation factor for translational directions ΓX, ΓY, ΓZ
- Participation factor for rotational directions ΓφX, ΓφY, ΓφZ
- Sums of results
The participation factor is defined as follows:
|
Mi |
Modal mass |
|
ui |
Eigenvector of the mode shape i |
|
M |
Mass matrix |
|
Tj |
jth column of the matrix T (axis transformation) |
The participation factors, which also define the degrees of freedom of rotation, are described in more detail in [1]. The participation factor Γi,j is dimensionless for translations; for rotations, it has the unit [m].
Masses in Mesh Points
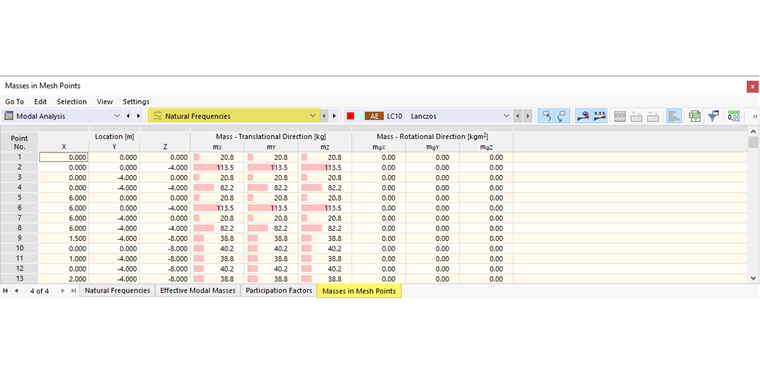
The "Masses in Mesh Points" tab lists the following results:
- Dimensions for translational directions mX, mY, mZ
- Mass for rotational directions mφX, mφY, mφZ
- Sums of masses
These values represent the masses that have been assigned in the modal analysis load case and applied to the nodes of the FE mesh during the calculation. They also depend on the modal analysis settings. Further information can be found in the chapter Masses.
The sum of the masses for each direction is given at the end of the table.
You can graphically display the masses in mesh points on the model. To do this, use the Mass category in the Navigator.
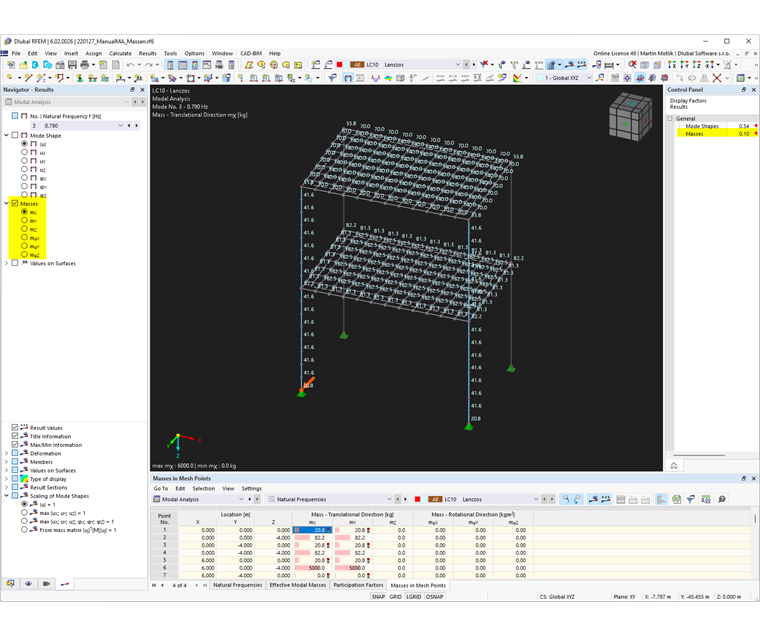
Use the control panel to adjust the scaling factors for the graphical display of masses.