






La catégorie du tableau de résultats Fréquences propres contient les fréquences propres du système non amorti. Dans la barre de titre du tableau, vous pouvez basculer entre les résultats des cas de charge modaux.

Chaque fréquence du système correspond à un mode propre. Les modes propres sont également affichés graphiquement (voir l'image
Résultats de l'analyse modale
). Sélectionnez le mode propre dans le navigateur ou basculez entre les modes propres avec les boutons
![]() et
et
![]() (voir la figure
Sélectionner un mode propre
). Vous pouvez également sélectionner la ligne correspondante dans le tableau pour afficher un mode propre particulier dans la fenêtre graphique.
(voir la figure
Sélectionner un mode propre
). Vous pouvez également sélectionner la ligne correspondante dans le tableau pour afficher un mode propre particulier dans la fenêtre graphique.
Fréquences propres
Le tableau « Fréquences propres » (voir la figure Catégorie de résultats « Fréquences propres ») donne un aperçu des résultats suivants du système non amorti :
- Valeur propre
- Fréquence angulaire
- Fréquence propre
- Période propre
L'équation du mouvement d'un système à plusieurs degrés de liberté sans amortissement est indiquée avec la Méthode de résolution calculée.
M dépend du type de Matrice de masse .
|
uj |
Composante de translation (j est la direction X/Y/Z) |
|
𝜑j |
Composante de rotation (j est la direction X/Y/Z) |
La valeur propre λ [1/s²] est liée à la fréquence angulaire ω [rad/s] avec λi = ωi2. La fréquence propre f [Hz] est ensuite dérivée avec f = ω / (2π). La période propre T [s] est l'inverse de la fréquence, qui est déterminée avec T = 1/f.
Pour un système à plusieurs degrés de liberté (MDOF), il existe plusieurs valeurs propres λi et modes propres ui associés.
Masses modales effectives

L'onglet « Masses modales effectives » contient un aperçu des résultats suivants :
- Masse modale Mi
- Masse modale effective pour les directions de translation meX, meY, meZ
- Masse modale effective pour les directions de rotation meφX, meφY, meφZ
- Facteur de masse modale effective pour les directions de translation fmeX, fmeY, fmeZ
- Facteur de masse modale effective pour les directions de rotation fmφX, fmφY, fmφZ
- Sommes des résultats
Les masses modales effectives décrivent la quantité de masse active dans chaque direction pour chaque mode propre du système.
La masse modale est définie comme suit :
Le vecteur propre ui d'un mode propre i est représenté dans l'équation modes propres. M dépend du type de Matrice de masse .
La masse modale Mi est indépendante de la direction. Elle change cependant en fonction de l'échelonnage des modes propres.
Les masses modales effectives mijeff décrivent les masses accélérées dans la direction j, où j = 1, 2, 3 pour la translation et j = 4, 5, 6 pour la rotation - pour chaque mode propre i. Ces masses sont indépendantes de l'échelonnage des modes propres. Ils sont directement liés aux facteurs de participation Γi, j (voir l'équation facteur de participation).
|
X, Y, Z |
Coordonnées globales du nœud EF pertinent |
|
X0, Y0, Z0 |
Coordonnées du centre de masse |
La matrice T existe pour chaque nœud EF.
Les masses modales effectives sont définies comme suit :
La somme des masses modales effectives ∑me est indiquée à la fin du tableau. Dans les directions en translation, ces sommes sont égales à la masse totale de la structure ∑M. Les seules exceptions sont les masses qui ne sont pas actives, par exemple les masses dans des appuis fixes. La masse totale n'est atteinte que si toutes les valeurs propres du modèle sont calculées.
Le facteur de masse modal effective fme est nécessaire pour décider si une forme spécifique doit être considérée pour la méthode du spectre de réponse. Par exemple, la Section 4.3.3.3 de l'EN 1998-1 spécifie que « la somme des masses modales effectives pour les modes considérés atteint au moins 90 % de la masse totale de la structure » et que « tous les modes dont la masse modale effective est supérieure à 5% de la masse totale sont pris en compte ».
Les facteurs de masse modale effective fme sont définis comme suit :
Pour plus d'informations sur l'analyse modale et les facteurs de masse modale effective, voir Meskouris [2] et Tedesco [3].
Facteurs de participation
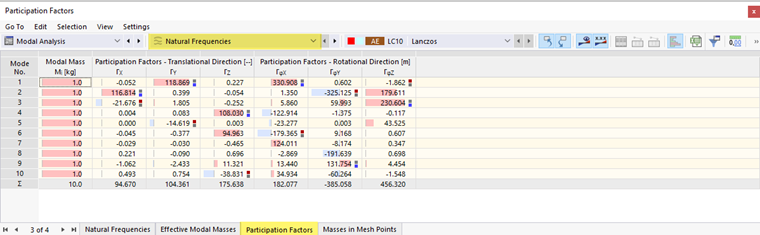
Les résultats suivants sont répertoriés dans l'onglet « Facteurs de participation » :
- Masse modale Mi
- Facteur de participation pour les directions de translation ΓX, ΓY, ΓZ
- Facteur de participation pour les directions de rotation ΓφX, ΓφY, ΓφZ
- Sommes des résultats
Le facteur de participation est défini comme suit :
|
Mi |
Masse modale |
|
ui |
Vecteur propre du mode propre i |
|
M |
Matrice des masses |
|
Tj |
je colonne de la matrice T (transformation d’axe) |
Les facteurs de participation, qui définissent également les degrés de liberté de rotation, sont décrits plus en détail dans [1]. Le facteur de participation Γi, j est sans dimension pour les translations ; pour les rotations, son unité est en [m].
Masses dans les points de maillage

Les résultats suivants sont affichés dans l'onglet « Masses dans les points de maillage » :
- Masses pour les directions de translation mX, mY, mZ
- Masse pour les directions de rotation mφX, mφY, mφZ
- Sommes des masses
Ces valeurs représentent les masses assignées dans le cas de charge de l'analyse modale et appliquées aux nœuds du maillage EF pendant le calcul. Elles dépendent également des Paramètres pour l'analyse modale. Vous trouverez de plus amples informations au chapitre Masses.
La somme des masses pour chaque direction est indiquée à la fin du tableau.
Vous pouvez afficher graphiquement les masses des points de maillage sur le modèle. Pour ce faire, utilisez la catégorie Masses dans le navigateur.
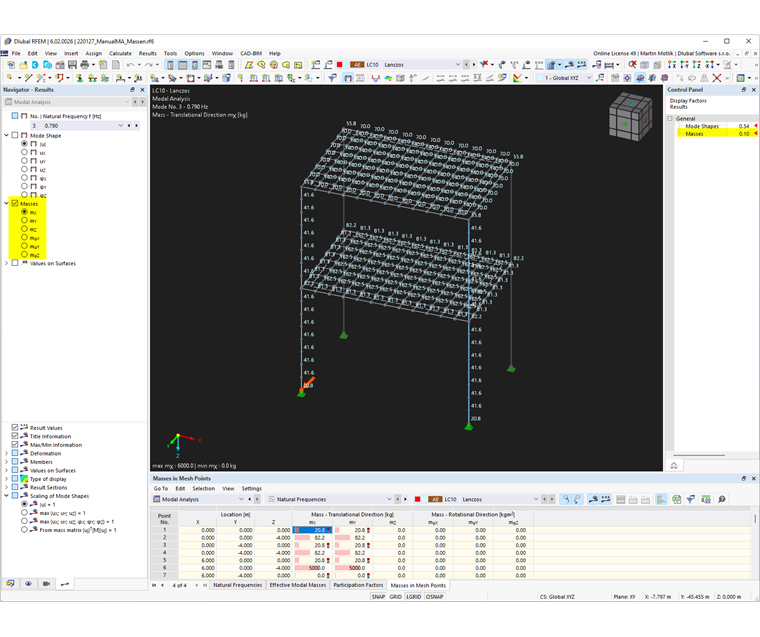
Le Panneau de contrôle permet d'ajuster les facteurs d'échelle pour la représentation graphique des masses.