






Kategoria tabeli wyników Częstotliwości drgań własnych zawiera częstotliwości drgań własnych układu niewytłumionego. Na pasku tytułowym tabeli można przełączać między wynikami przypadków obciążeń modalnych.

Każda częstotliwość układu ma swój własny tryb własny. Kształty trybów są również wyświetlane graficznie (patrz rysunek # extbookmark manual|image027573|Wyniki analizy modalnej #). Wybierz tryb własny w nawigatorze lub użyj przycisków
![]() i
i
![]() , aby przełączać się między trybami własnymi (patrz rysunek # extbookmark instrukcja obsługi|image027595|Wybierz modus kształt #). Można również wybrać odpowiedni wiersz w tabeli, aby wyświetlić w oknie roboczym określony kształt postaci.
, aby przełączać się między trybami własnymi (patrz rysunek # extbookmark instrukcja obsługi|image027595|Wybierz modus kształt #). Można również wybrać odpowiedni wiersz w tabeli, aby wyświetlić w oknie roboczym określony kształt postaci.
Częstotliwości drgań własnych
Tabela 'Części własne' (patrz ilustracja image027927 kategoria wyników 'Części własne' ) zawiera przegląd następujących wyników dla układu bez tłumienia:
- Wartości własne
- częstość kątowa
- Częstotliwość drgań własnych
- Okres własny
Równanie ruchu układu o wielu stopniach swobody bez tłumienia jest podane z # extbookmark manual|eigenvalue-solver|Metoda rozwiązywania # obliczona.
M zależy od typu # extbookmark manual|mass-matrix|Macierz mas #.
|
uj |
Składowa translacyjna (j jest kierunkiem X/Y/Z) |
|
𝜑j |
Składowa obrotu (j jest kierunkiem X/Y/Z) |
Wartość własna λ [1/s²] jest powiązana z częstotliwością kątową ω [rad/s], gdzie λi = ωi2. Częstotliwość drgań własnych f [Hz] jest następnie wyprowadzana ze wzoru f = ω/(2π). Okres drgań własnych T [s] jest odwrotnością częstotliwości, która jest określana za pomocą T = 1/f.
Dla układu o kilku stopniach swobody (MDOF) istnieje kilka wartości własnych λi i powiązanych z nimi postaci własnych ui .
Efektywne masy modalne

Zakładka 'Efektywne masy modalne' zawiera przegląd następujących wyników:
- Masa modalna Mi
- Efektywna masa modalna dla kierunków translacyjnych meX, meY, meZ
- Efektywna masa modalna dla kierunków obrotu meφX, meφY, meφZ
- Efektywny współczynnik masy modalnej dla kierunków translacji fmeX, fmeY, fmeZ
- Efektywny współczynnik masy modalnej dla kierunków obrotu fmφX, fmφY, fmφZ
- Sumy wyników
Efektywne masy modalne opisują, jaka masa jest aktywowana w każdym kierunku przez każdą postać własną układu.
Masa modalna jest zdefiniowana w następujący sposób:
Wektor własny ui postaci własnej i przedstawiony jest w równaniu formuła001058 postacie własne . M zależy od typu # extbookmark manual|mass-matrix|Macierz mas #.
Masa modalna Mi jest niezależna od kierunku. Zmienia się ona jednak w zależności od skalowania postaci modów .
Efektywne masy modalne mijeff opisują masy, które są przyspieszane w kierunku j, gdzie j = 1, 2, 3 dla ruchu postępowego i j = 4, 5, 6 dla obrotu - dla każdej postaci własnej i. Masy te są niezależne od skalowania postaci drgań . Są one bezpośrednio powiązane z współczynnikami udziału TABLE_PARTICIPATION_FACTORS Γi, j (patrz równanie formuła001060 współczynnik udziału ).
|
X, Y, Z |
globalna współrzędna rozważanego węzła FE |
|
X0, Y0, Z0 |
Współrzędne środka ciężkości |
Macierz T istnieje dla każdego węzła ES.
Efektywne masy modalne definiuje się następująco:
Suma efektywnych mas modalnych ∑me jest podana na końcu tabeli. W kierunkach translacyjnych sumy te są równe całkowitej masie konstrukcji ∑M. Wyjątkiem są masy, które nie są aktywowane, na przykład masy w nieruchomych podporach. Pełna masa zostaje osiągnięta tylko wtedy, gdy wszystkie wartości własne modelu zostaną obliczone.
Efektywny modalny współczynnik masy fme jest potrzebny do podjęcia decyzji, czy w metodzie spektrum odpowiedzi należy uwzględnić określony kształt. Na przykład norma EN 1998-1, sekcja 4.3.3.3 określa, że „suma efektywnych mas modalnych uwzględnianych udziałów modalnych wynosi co najmniej 90% całkowitej masy konstrukcji” oraz że „uwzględniane są wszystkie udziały modalne”. uwzględniać, czyje efektywne masy modalne są większe niż 5% całkowitej wielkości masy ”.
Efektywne modalne współczynniki masy fme definiuje się następująco:
Więcej informacji na temat analizy modalnej i efektywnych modalnych współczynników masy można znaleźć w Meskouris Refer [2 ] i Tedesco Refer [3 ].
Współczynniki udziału
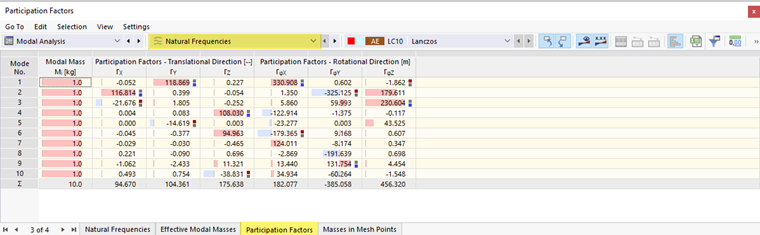
W zakładce 'Współczynniki udziału' wyświetlane są następujące wyniki:
- Masa modalna Mi
- Współczynnik partycypacji dla kierunków translacyjnych ΓX, ΓY, ΓZ
- Współczynnik partycypacji dla kierunków obrotu ΓφX, ΓφY, ΓφZ
- Sumy wyników
Współczynnik udziału definiuje się następująco:
|
Mi |
Masa modalna |
|
ui |
Wektor własny postaci własnej i |
|
M |
Macierz masy |
|
Tj |
Kolumna jta macierzy T (transformacja osi) |
Współczynniki udziału, które definiują również stopnie swobody obrotu, zostały opisane bardziej szczegółowo w Patrz [1 ]. Współczynnik udziału Γi, j jest dla translacji bezwymiarowy; dla obrotów ma jednostkę [m].
Masy w punktach siatki

W rejestrze 'masy w punktach osnowy' podane są następujące wyniki:
- Wymiary dla kierunków translacyjnych mX, mY, mZ
- Masa dla kierunków obrotu mφX, mφY, mφZ
- Sumy mas
Wartości te reprezentują masy, które zostały przypisane w przypadku obciążenia analizy modalnej i przyłożone do węzłów siatki ES podczas obliczeń. Zależą one również od ustawień analizy modalnej . Więcej informacji można znaleźć w rozdziale Masy .
Suma mas dla każdego kierunku jest podana na końcu tabeli.
Masy w punktach sieci można wyświetlić graficznie na modelu. W tym celu należy użyć kategorii Masa w Nawigatorze.
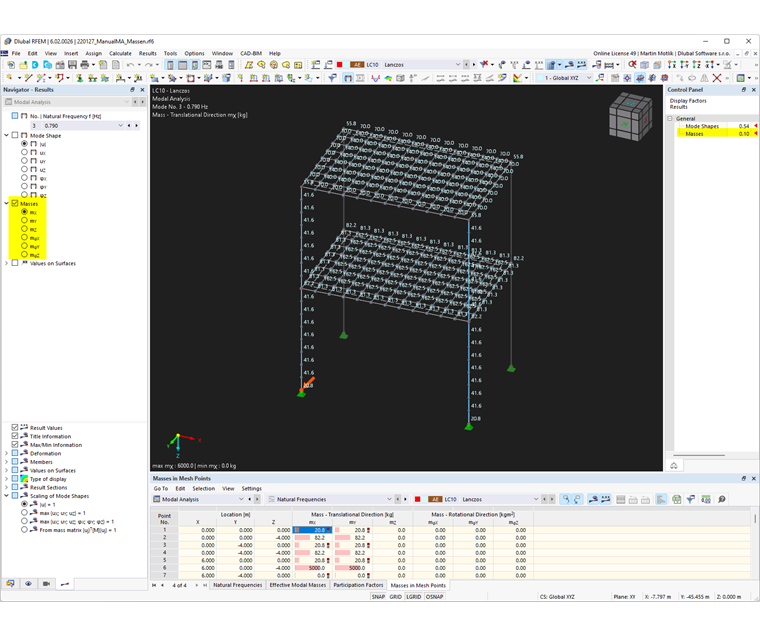
W # extbookmark instrukcji|resultFactorsTab|Panel sterowania # umożliwia dostosowanie współczynników przechyłki dla graficznego przedstawienia mas.