






La turbulencia es uno de los fenómenos más complicados observados en la naturaleza, lo que dificulta una definición precisa. En el flujo turbulento, el fluido sigue trayectorias curvas irregulares llamadas remolinos. Generalmente, el flujo está entrelazado y crea estructuras de flujo de muchos tamaños diferentes. Se mueven y giran continuamente, interactúan entre sí y con el campo de flujo principal, y cambian de forma y tamaño rápidamente. La mezcla es significativa y afecta la difusión del momento. Como consecuencia, afecta las fuerzas aerodinámicas en el fluido y los patrones de carga sobre los obstáculos en el flujo. Si desea estudiar este complicado fenómeno, le recomendamos esta Introducción a la turbulencia. [1]
Las estructuras turbulentas causan vorticidad en el fluido; la cantidad física "vorticidad" se usa a menudo para describir la turbulencia en lugar de la velocidad.
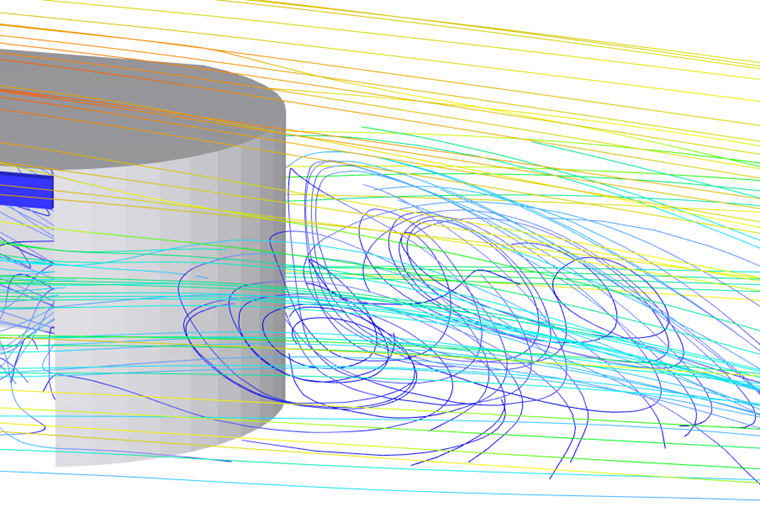
La vorticidad se genera principalmente en los límites sólidos. En las capas límite formadas a lo largo de los límites sólidos, la velocidad varía desde cero en el límite (condición de no deslizamiento) hasta un valor en su mayoría no afectado por el límite, determinado por el flujo libre. La turbulencia ocurre cuando las inestabilidades, como la rugosidad de la superficie del límite, hacen que la vorticidad se vuelva caótica, sostenida por un número de Reynolds suficientemente alto. Cuando una capa límite se separa del límite, la vorticidad y la turbulencia son arrastradas hacia regiones del fluido alejadas de los límites sólidos. Los remolinos grandes suelen ser anisotrópicos (por ejemplo, el flujo que pasa por un cilindro causa el desprendimiento de vórtices). Las perturbaciones del flujo desencadenan inestabilidades que hacen que los vórtices se estiren, compriman y desaparezcan. Las estructuras de flujo coherentes se desintegran rápidamente en una masa de remolinos turbulentos con crecimiento de isotropía a pequeña escala. Los remolinos grandes se vuelven más pequeños hasta que alcanzan un tamaño donde la disipación de su energía cinética debido a la viscosidad es significativa. La pérdida de energía cinética hace que estos remolinos desaparezcan. [2]
Para un fluido incompresible, la vorticidad obedece a la ecuación de transporte.
Modelado numérico de la turbulencia
Para capturar completamente la turbulencia mediante el modelado numérico, se deben resolver las ecuaciones de movimiento para el flujo de fluidos en todas las escalas espaciales y temporales. No existe un método universal adecuado.
El método exacto que calcula el flujo utilizando las ecuaciones gobernantes del flujo para todas las escalas, denominado "Simulación Numérica Directa" (DNS, por sus siglas en inglés), no es aplicable para la CFD práctica debido a sus costos computacionales. Los recursos computacionales requeridos por la DNS superan con creces la capacidad de las supercomputadoras más potentes disponibles actualmente.
Modelos LES para la turbulencia
En lugar de la DNS, la "Simulación de Grandes Remolinos" (LES, por sus siglas en inglés) resuelve explícitamente los remolinos para escalas grandes, mientras que para las escalas pequeñas se utiliza el modelado de turbulencia (modelado de escala de submalla). Tiene limitaciones severas en las regiones cercanas a la pared. En estas áreas, el esfuerzo computacional requerido para la capa límite aumenta rápidamente, ya que la escala de longitud de la turbulencia se reduce y requiere una malla más fina. Sin embargo, para flujos de cortadura libre, donde los remolinos grandes son del mismo orden de magnitud que la capa de cortadura y fuertemente anisotrópicos, LES puede proporcionar resultados extremadamente fiables. Esto es útil para resolver problemas como las vibraciones inducidas por el flujo, etc. Se utilizan varios modelos de escala de submalla en LES. El modelo original y ampliamente utilizado de Smagorinski tiene sus limitaciones en regiones cercanas a la pared. El modelo WALE (viscosidad de remolino local adaptativa a la pared) supera estas limitaciones y evita la amortiguación de la turbulencia cerca de las superficies.
Modelos RANS para la turbulencia
Para la mayoría de los problemas prácticos de CFD, los costos computacionales de DNS y, en menor medida, de LES son demasiado altos. En su lugar, el método de las "Ecuaciones de Navier-Stokes Promediadas por Reynolds" (RANS, por sus siglas en inglés) es mucho más asequible. RANS se basa en la descomposición de Reynolds, según la cual una variable de flujo se descompone en componentes medios y fluctuantes. Cuando se aplica la descomposición a las ecuaciones de Navier-Stokes, surge un término adicional conocido como el "Tensor de Esfuerzos de Reynolds" y es necesario "cerrar" un sistema de ecuaciones. Los niveles de los modelos de turbulencia RANS están relacionados con el número de ecuaciones diferenciales añadidas a las ecuaciones RANS para "cerrarlas". [3]
Los modelos de dos ecuaciones más populares son k-ε y k-ω, cada uno con sus ventajas y desventajas. Un representante de los modelos de una ecuación, el modelo de turbulencia "Spalart-Allmaras" (SA), fue desarrollado específicamente para flujos aerodinámicos y también se usa a menudo en los métodos híbridos globales (consulte el subcapítulo [#Modelos híbridos globales para la turbulencia Global hybrid models for turbulence]).
Modelo de turbulencia Spalart-Allmaras
El modelo Spalart-Allmaras resuelve la ecuación de transporte modelada para la viscosidad turbulenta de remolino νT. La ecuación resuelve una variable similar a la viscosidad ṽ. La variable ṽ es más fácil de calcular que νT directamente, por lo que primero se calcula numéricamente la variable ṽ. Luego, la viscosidad turbulenta de remolino νT se actualiza utilizando ṽ y finalmente se agrega a la ecuación de momento para cerrar el sistema de ecuaciones y ser resuelto. Puede encontrar una descripción detallada aquí: Spalart – Allmaras Model
Modelo de turbulencia k-ε
El modelo k-ε fue el primer modelo de turbulencia ampliamente utilizado para una variedad de flujos en CFD. Se basa en una analogía del movimiento aleatorio de los remolinos en un flujo de fluido turbulento con el movimiento aleatorio de partículas a escala molecular, sugerida por Boussinesq. Introdujo el concepto de viscosidad de remolino, que es proporcional a la velocidad característica y la longitud de mezcla de la turbulencia. Se requiere un modelo para representar cada una de estas escalas. El modelo k-ε es un modelo típico de dos ecuaciones, que resuelve las ecuaciones de transporte para la energía cinética turbulenta k (para la escala de velocidad) y la tasa de disipación de energía turbulenta ε (para la escala de tiempo de disipación). [2], [3]
El modelo k-ε es robusto y computacionalmente económico. Es válido solo para flujos completamente turbulentos. Por lo tanto, es adecuado para iteraciones iniciales y estudios paramétricos. Funciona mal para flujos complejos que implican gradientes de presión severos o adversos, separaciones y curvaturas fuertes de las líneas de corriente. También se comporta de manera problemática en los límites.
Modelo de turbulencia k-ω
El modelo k-ω "cierra" el sistema RANS mediante dos ecuaciones diferenciales parciales para k y ω, siendo la primera variable nuevamente la energía cinética turbulenta y la segunda la tasa específica de disipación (de la energía cinética turbulenta k en energía térmica interna). Su término de disipación físicamente más consistente le da al modelo k-ω una ventaja sobre el modelo k-ε en la región cercana a la pared. También tiene un buen rendimiento para flujos de cortadura libre y flujos con bajo número de Reynolds. Es más adecuado para flujos de capa límite complejos y separación en aerodinámica externa (sin embargo, la separación del flujo normalmente se calcula como demasiado excesiva y temprana, y por lo tanto requiere una alta resolución de malla cerca de la pared). También se puede utilizar para flujos transicionales.
Modelo de turbulencia SST k-ω
Uno de los modelos más populares en CFD industrial es el modelo de turbulencia SST k-ω (transporte de esfuerzo cortante), que combina el modelo k-ω cerca de las paredes y k-ε en la corriente libre, beneficiándose de las ventajas de ambos modelos. Fue publicado por primera vez en 1994 por F. R. Menter, consulte también el artículo de Wikipedia).
Los modelos de dos ecuaciones contienen muchas suposiciones y están calibrados para funcionar bien solo de acuerdo con las características bien conocidas de las aplicaciones para las que están diseñados. No obstante, su solidez ha quedado demostrada y los cálculos de CFD industriales los utilizan ampliamente.
Modelos de turbulencia URANS
URANS, o modelos RANS no estacionarios, se utilizan en la industria como una herramienta rápida para simulaciones de flujos transitorios. Aunque el enfoque considera la dependencia del tiempo, no resuelve las estructuras turbulentas explícitamente. La validez de URANS requiere una clara separación de escalas de tiempo entre el flujo no estacionario resuelto y las fluctuaciones turbulentas, lo cual no siempre está garantizado, y a menudo falta una justificación rigurosa M. D. Israel, 2022.
Modelos híbridos globales para la turbulencia
Para problemas más complejos, donde se requieren las ventajas de los métodos mencionados anteriormente, pero los costos computacionales deben seguir siendo razonables, se pueden utilizar los "métodos híbridos globales". Los métodos híbridos globales se basan en una combinación de los métodos LES y RANS, conmutándolos a medida que cambia el nivel de resolución. RANS se aplica en las capas límite, donde LES tendría altos costos computacionales, mientras que los remolinos grandes en la corriente libre son resueltos por LES, que es capaz de modelar estructuras turbulentas anisotrópicas significativamente mejor que RANS. En otras palabras, las regiones donde la escala de longitud turbulenta es menor que la dimensión máxima de la malla utilizan el modo de solución RANS. A medida que la escala de longitud turbulenta excede la dimensión de la malla, las regiones se resuelven utilizando el modo LES, reduciendo así los costos computacionales significativamente, pero ofreciendo aún algunas de las ventajas del método LES en regiones separadas. Los modelos más populares son "Detached Eddy Simulation" (DES) o "Delayed Detached Eddy Simulation" (DDES).
Modelo Spalart-Allmaras DDES
Un ejemplo ampliamente utilizado es la "Spalart-Allmaras Delayed Detached Eddy Simulation", consulte OpenFOAM®. La principal mejora de "Delayed Detached Eddy Simulation" (DDES) es incluir la información de la viscosidad turbulenta en el mecanismo de conmutación de RANS/LES para retrasar esta conmutación en las capas límite. El sistema RANS se "cierra" mediante una ecuación de transporte de viscosidad de remolino según el "modelo Spalart-Allmaras" con una escala de longitud del modelo incorporada a la distancia a la pared.
Turbulencia en RWIND 3
Los modelos de turbulencia en RWIND 3 se pueden dividir en dos grupos: modelos utilizados para simulaciones de flujo estacionario o transitorio.
Flujo estacionario
Aunque está claro que la fluctuación en la turbulencia es un fenómeno que varía en el tiempo, muchos patrones de flujo pueden considerarse como el llamado estado estadísticamente estacionario, donde típicamente se asume que la turbulencia es isotrópica y se modela mediante modelos RANS. Entonces, se puede aplicar un cálculo de flujo estacionario con turbulencia modelada. Para cálculos de flujo estacionario, RWIND 3 ofrece los modelos RANS k-ε y SST k-ω. El modelo k-ε es robusto y computacionalmente económico, pero no muy preciso, especialmente en las regiones cercanas a la pared. Por lo tanto, se recomienda para estudios iniciales y paramétricos. El modelo de turbulencia SST k-ω funciona mejor en regiones cercanas a la pared (lo cual es el foco en aplicaciones de ingeniería civil), pero los costos computacionales son más altos y la convergencia es más sensible. Las regiones cercanas a la pared deben resolverse con una malla suficientemente fina.
Flujo transitorio
Los modelos de turbulencia para el cálculo transitorio en RWIND 3 son los siguientes: modelos URANS ( k-ε y k-ω), Spalart-Allmaras DDES y LES. Para la mayoría de las aplicaciones, recomendamos usar el modelo Spalart-Allmaras DDES. Este modelo da buenos resultados para estructuras de flujo anisotrópicas en la corriente libre utilizando LES, pero mantiene los costos computacionales razonables al usar el modelo RANS en la región cercana a la pared y así evitar mallas muy finas allí. Como una opción rápida y económica, los modelos URANS (RANS no estacionarios) están disponibles en RWIND 3. Aunque son computacionalmente más baratos que otras opciones, debemos señalar que solo deben usarse para estudios iniciales y estimaciones aproximadas. Desde RWIND 3.06, está disponible un modelo de turbulencia LES puro. Se adopta un modelo de escala de submalla WALE (viscosidad de remolino local adaptativa a la pared). Para realizar una simulación correcta con LES, recomendamos esta opción solo a usuarios avanzados. La calidad de la malla debe ser muy alta y estar justificada por la distribución de energía cinética turbulenta. Las simulaciones consumen mucho tiempo/recursos computacionales, pero son capaces de predecir fenómenos como el desprendimiento de vórtices, etc.