






La turbulence est l’un des phénomènes les plus complexes observés dans la nature, ce qui rend une définition précise difficile. Dans un écoulement turbulent, le fluide suit des trajectoires courbes irrégulières appelées tourbillons. Généralement, l’écoulement est enchevêtré et crée des structures d’écoulement de tailles très différentes. Elles se déplacent et tournent continuellement, interagissent entre elles et avec le champ d’écoulement principal, et changent rapidement de forme et de taille. Le mélange est significatif et affecte la diffusion de la quantité de mouvement. En conséquence, cela affecte les forces aérodynamiques dans le fluide et les motifs de charge sur les obstacles dans l’écoulement. Si vous souhaitez étudier ce phénomène compliqué, nous recommandons cette introduction. [1]
Les structures turbulentes provoquent de la vorticité dans le fluide ; la grandeur physique « vorticité » est souvent utilisée pour décrire la turbulence plutôt que la vitesse.
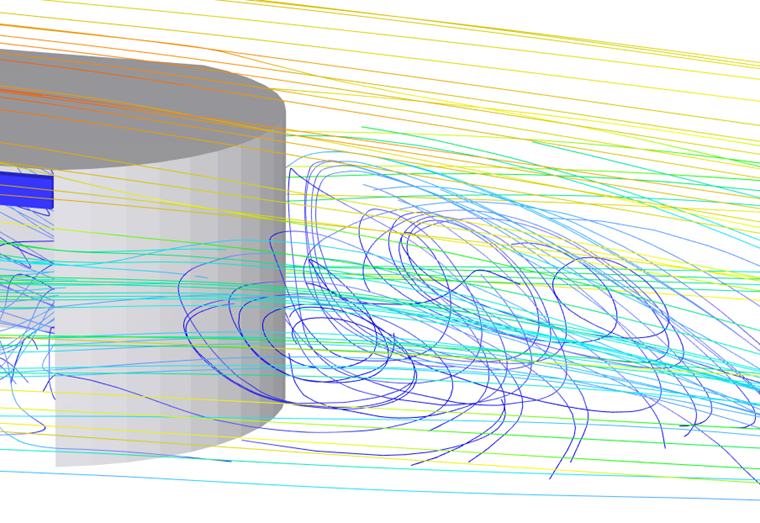
La vorticité est générée principalement aux frontières solides. Dans les couches limites formées le long des frontières solides, la vitesse varie de zéro au contour (condition d’adhérence) jusqu’à une valeur généralement non affectée par le contour, déterminée par l’écoulement libre. La turbulence se produit lorsque des instabilités, telles que la rugosité de la surface de contour, rendent la vorticité chaotique, entretenue par un nombre de Reynolds suffisamment élevé. Lorsqu’une couche limite se décolle de la frontière, la vorticité et la turbulence sont ainsi emportées dans des régions du fluide éloignées des frontières solides. Les grands tourbillons sont généralement anisotropes (par exemple, l’écoulement autour d’un cylindre provoque le détachement tourbillonnaire). Les perturbations de l’écoulement déclenchent des instabilités qui font que les tourbillons s’étirent, se compriment et disparaissent. Les structures d’écoulement cohérentes se désintègrent rapidement en une masse de tourbillons turbulents avec un accroissement de l’isotropie à petite échelle. Les grands tourbillons deviennent plus petits jusqu’à atteindre une taille où la dissipation de leur énergie cinétique due à la viscosité est significative. La perte d’énergie cinétique entraîne la disparition de ces tourbillons. [2]
Pour un fluide incompressible, la vorticité obéit à l’équation de transport.
Modélisation numérique de la turbulence
Afin de capturer complètement la turbulence par modélisation numérique, les équations du mouvement pour l’écoulement des fluides sur toutes les échelles spatiales et temporelles doivent être résolues. Aucune méthode universelle appropriée n’existe.
La méthode exacte calculant l’écoulement en utilisant les équations déterminantes pour toutes les échelles, appelée « DNS » (Simulation numérique directe), n’est pas applicable en CFD pratique en raison de ses coûts de calcul. Les ressources de calcul requises par la DNS dépassent de loin la capacité des supercalculateurs les plus puissants actuellement disponibles.
Modèles LES pour la turbulence
Au lieu de la DNS, la méthode LES (Simulation des grandes structures de turbulence) résout explicitement les tourbillons pour les grandes échelles, tandis que pour les petites échelles, une modélisation de la turbulence est utilisée (modélisation à l’échelle de sous-grille). Elle présente de sévères limitations dans les régions proches des parois. Dans ces zones, l’effort de calcul requis pour la couche limite augmente rapidement, car l’échelle de longueur de la turbulence diminue et nécessite un maillage plus fin. Cependant, pour les écoulements de cisaillement libres, où les grands tourbillons sont du même ordre de grandeur que la couche de cisaillement et fortement anisotropes, LES peut fournir des résultats d’une grande fiabilité. C’est utile pour résoudre des problèmes tels que les vibrations induites par le flux, etc.
Divers modèles sous-maille sont utilisés en LES. Le modèle d’origine et largement utilisé de Smagorinsky a ses limites dans les régions proches des parois. Le modèle WALE (viscosité tourbillonnaire locale adaptative à la paroi) surmonte ces limitations et empêche l’amortissement de la turbulence près des surfaces.
Modèles RANS pour la turbulence
Pour la plupart des problèmes pratiques de CFD, les coûts de calcul de la DNS et, dans une moindre mesure, de la LES sont trop élevés. Au lieu de cela, la méthode RANS est beaucoup plus abordable. La méthode RANS est basée sur la décomposition de Reynolds, selon laquelle une variable d’écoulement est décomposée en composantes moyenne et fluctuante. Lorsque la décomposition est appliquée aux équations de Navier-Stokes, un terme supplémentaire connu sous le nom de « tenseur des contraintes de reynolds » apparaît et un système d’équations doit être « fermé ». Les niveaux des modèles de turbulence RANS sont liés au nombre d’équations différentielles ajoutées aux équations RANS afin de les « fermer ». [3]
Les modèles à deux équations les plus populaires sont k-ε et k-ω, chacun ayant ses avantages et inconvénients. Un représentant des modèles à une équation, le modèle de turbulence « Spalart-Allmaras » (SA), a été développé spécifiquement pour les écoulements aérodynamiques et est également souvent utilisé dans les méthodes hybrides globales (voir le sous-chapitre [#GlobalHybridModelsForTurbulence Modèles hybrides globaux pour la turbulence]).
Modèle de turbulence Spalart-Allmaras
Le modèle Spalart-Allmaras résout l’équation de transport modélisée pour la viscosité turbulente tourbillonnaire νT. L’équation résout une variable de type viscosité ṽ. La variable ṽ est plus facile à calculer que νT directement, donc la variable ṽ est d’abord calculée numériquement. Ensuite, la viscosité turbulente tourbillonnaire νT est mise à jour en utilisant ṽ et finalement ajoutée à l’équation de quantité de mouvement pour fermer le système d’équations et être résolu. Pour en savoir plus, voici une description détaillée : Spalart – Allmaras Model
Modèle de turbulence k-ε
Le modèle k-ε a été le premier modèle de turbulence à être largement utilisé pour une variété de flux en CFD. Il est basé sur une analogie du mouvement aléatoire des tourbillons dans un écoulement fluide turbulent avec le mouvement aléatoire des particules à l’échelle moléculaire, suggérée par Boussinesq. Il a introduit le concept de viscosité tourbillonnaire, qui est proportionnelle à la vitesse caractéristique et à la longueur de mélange de la turbulence. Un modèle est requis pour représenter chacune de ces échelles. Le modèle k-ε est un modèle typique à deux équations, qui résout les équations de transport pour l’énergie cinétique turbulente k (pour l’échelle de vitesse) et le taux de dissipation d’énergie turbulente ε (pour l’échelle de temps de dissipation). [2], [3]
Le modèle k-ε est robuste et peu coûteux en calcul. Il n’est valable que pour les écoulements pleinement turbulents. Par conséquent, il est adapté aux itérations initiales et aux études paramétriques. Il fonctionne mal pour les écoulements complexes impliquant des gradients de pression sévères ou adverses, des séparations et de fortes courbures de lignes de flux. Il se comporte également de manière problématique aux limites.
Modèle de turbulence k-ω
Le modèle k-ω « ferme » le système RANS par deux équations aux dérivées partielles pour k et ω, la première variable étant à nouveau l’énergie cinétique turbulente et la seconde le taux de dissipation spécifique (de l’énergie cinétique turbulente k en énergie thermique interne). Son terme de dissipation physiquement plus cohérent donne au modèle k-ω un avantage sur le modèle k-ε dans la région proche de la paroi. Il a également de bonnes performances pour les écoulements cisaillés libres et à faible nombre de Reynolds. Il est plus adapté aux écoulements de couche limite complexes et au décollement en aérodynamique externe (cependant, la séparation de l’écoulement est typiquement calculé comme étant trop excessif et précoce, et nécessite donc une haute résolution de maillage près de la paroi). Il peut également être utilisé pour les flux transitoires.
Modèle de turbulence SST k-ω
L’un des modèles les plus populaires en CFD industrielle est le modèle de turbulence SST k-ω (transport des contraintes de cisaillement), qui combine le modèle k-ω près des parois et le modèle k-ε dans l’écoulement libre, bénéficiant des avantages des deux modèles. Il a été publié pour la première fois en 1994 par F. R. Menter, voir aussi cet article Wikipedia).
Les modèles à deux équations contiennent de nombreuses hypothèses et sont calibrés pour bien fonctionner uniquement selon les caractéristiques bien connues des applications pour lesquelles ils sont conçus. Néanmoins, leur robustesse a fait ses preuves, et les calculs CFD industriels les utilisent largement.
Modèles de turbulence URANS
Les modèles URANS ou RANS transitoires sont utilisés dans l’industrie comme un outil rapide pour les simulations de flux transitoires. Bien que l’approche considère la dépendance temporelle, elle ne résout pas les structures de turbulences explicitement. La validité d’URANS nécessite une séparation claire des échelles de temps entre le flux transitoire résolu et les fluctuations turbulentes, ce qui n’est pas toujours garanti, et une justification rigoureuse fait souvent défaut M. D. Israel, 2022.
Modèles hybrides globaux pour la turbulence
Pour des problèmes plus complexes, où les avantages des méthodes mentionnées ci-dessus sont requis, mais où les coûts de calcul doivent rester raisonnables, des « méthodes hybrides globales » peuvent être utilisées. Les méthodes hybrides globales sont basées sur une combinaison des méthodes LES et RANS, en les basculant lorsque le niveau de résolution change. La méthode RANS est appliquée aux couches limites, où LES aurait des coûts de calcul élevés, tandis que les grands tourbillons dans l’écoulement libre sont résolus par LES, qui est capable de modéliser les structures turbulentes anisotropes significativement mieux que la méthode RANS. En d’autres termes, les régions où l’échelle de longueur turbulente est inférieure à la dimension maximale de la grille utilisent le mode de résolution RANS. Lorsque l’échelle de longueur turbulente dépasse la dimension de la grille, les régions sont résolues en utilisant le mode LES, réduisant ainsi significativement les coûts de calcul, tout en offrant certains des avantages de la méthode LES dans les régions décollées. Les modèles les plus populaires sont la « DES » (Detached Eddy Simulation) ou la « DDES » (Delayed Detached Eddy Simulation).
Modèle Spalart-Allmaras DDES
Un exemple largement utilisé est la Spalart-Allaras DDES, voir OpenFOAM®.
La principale amélioration par rapport à la DDES est d’inclure l’information de viscosité turbulente dans le mécanisme de commutation RANS/LES pour retarder cette commutation dans les couches limites. Le système RANS est « fermé » par une équation de transport de viscosité tourbillonnaire selon le « modèle Spalart-Allmaras » avec une échelle de longueur de modèle incorporée à la distance à la paroi.
Turbulence dans RWIND 3
Les modèles de turbulence dans RWIND 3 peuvent être divisés en deux groupes – les modèles utilisés pour les simulations d’écoulement stationnaire ou transitoire.
Flux stationnaire
Bien qu’il soit clair que la fluctuation en turbulence est un phénomène variable dans le temps, de nombreux motifs d’écoulement peuvent être considérés comme un état dit statistiquement stationnaire, où la turbulence est typiquement présumée isotrope et modélisée par des modèles RANS. Ensuite, un calcul des flux stationnaires avec turbulence modélisée peut être appliqué.
Pour les calculs de flux stationnaire, RWIND 3 propose les modèles RANS k-ε et SST k–ω.
Le modèle k-ε est robuste et peu coûteux en calcul, mais pas très précis, en particulier dans les régions proches des parois. Par conséquent, il est recommandé pour les études initiales et paramétriques.
Le modèle de turbulence SST k–ω fonctionne mieux dans les régions proches des parois (ce qui est au centre des applications en génie civil), mais les coûts de calcul sont plus élevés et la convergence est plus sensible. Les régions proches des parois doivent être résolues avec un maillage suffisamment fin.
Flux transitoire
Les modèles de turbulence pour le calcul des flux transitoires dans RWIND 3 sont les suivants – modèles URANS (k-ε et k–ω), Spalart-Allmaras DDES et LES.
Pour la plupart des applications, nous recommandons d’utiliser le modèle Spalart-Allmaras DDES. Ce modèle donne de bons résultats pour les structures d’écoulement anisotropes dans l’écoulement libre en utilisant la LES, mais maintient des coûts raisonnables en puissance de calcul en utilisant le modèle RANS dans la région proche de la paroi et évitant ainsi des maillages très fins à cet endroit.
Comme option rapide et économique, les modèles URANS (RANS transitoires) sont disponibles dans RWIND 3. Bien qu’ils soient moins coûteux en calcul que les autres options, nous devons noter qu’ils ne devraient être utilisés que pour des études initiales et des estimations grossières.
Depuis RWIND 3.06, un modèle de turbulence LES pur est disponible. Un modèle de sous-grille WALE (viscosité tourbillonnaire locale adaptative à la paroi) est adopté. Afin d’effectuer une simulation correcte avec la LES, nous recommandons cette option uniquement aux utilisateurs avancés. La qualité du maillage doit être très élevée et justifiée par la distribution d’énergie cinétique turbulente. Les simulations sont très longues/coûteuses en calcul, mais elles sont capables de prédire des phénomènes tels que le détachement tourbillonnaire, etc.