






Turbulence is one of the most complicated phenomena observed in nature, making a precise definition difficult. In turbulent flow, the fluid follows irregular curved paths called eddies. Generally, the flow is intertwined and creates flow structures of many different sizes. They move and rotate continuously, interact with each other and the main flow field, and change shape and size rapidly. The mixing is significant and affects momentum diffusion. As a consequence, it affects the aerodynamic forces in the fluid and the load patterns on obstacles in the flow. If you want to study this complicated phenomenon, we recommend this Introduction to Turbulence. [1]
Turbulent structures cause vorticity in the fluid; the physical quantity "vorticity" is often used to describe turbulence rather than velocity.
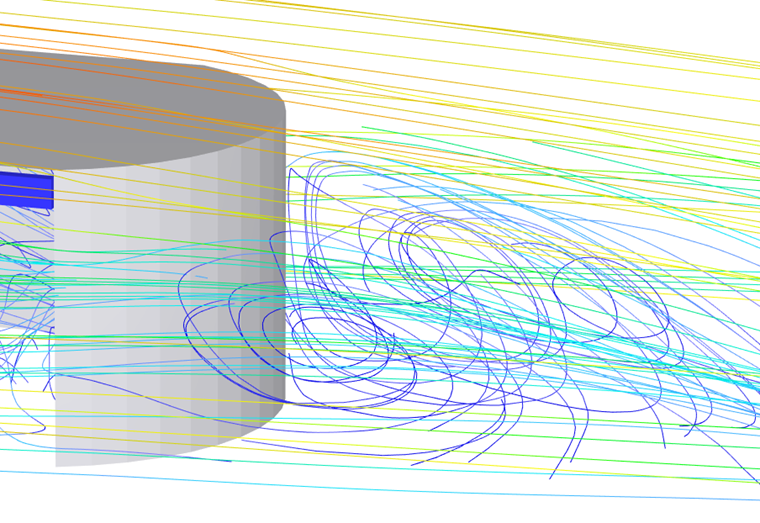
Vorticity is generated primarily at solid boundaries. In boundary layers formed along solid boundaries, the velocity varies from zero at the boundary (no-slip condition) to a value mostly unaffected by the boundary, determined by the free flow. Turbulence occurs when instabilities, such as roughness of the boundary surface, cause the vorticity to become chaotic, sustained by a sufficiently high Reynolds number. When a boundary layer separates from the boundary, vorticity and turbulence are thereby swept into regions of fluid away from solid boundaries. Large eddies are usually anisotropic (for example, flow past a cylinder causes the shedding of vortices). Flow disturbances trigger instabilities that cause vortices to stretch, compress, and disappear. Coherent flow structures disintegrate rapidly into a mass of turbulent eddies with growth of isotropy on a small scale. Large eddies become smaller until they reach a size where the dissipation of their kinetic energy due to viscosity is significant. The loss of kinetic energy causes these eddies to vanish. [2]
For an incompressible fluid, the vorticity obeys the transport equation.
Numerical Modelling of Turbulence
In order to fully capture turbulence by numerical modeling, the equations of motion for fluid flow on all spatial and temporal scales must be solved. No suitable universal method exists.
The exact method calculating the flow using the flow governing equations for all scales, referred to as "Direct Numerical Simulation" (DNS), is not applicable for practical CFD due to its computational costs. The computational resources required by DNS far exceed the capacity of the most powerful supercomputers currently available.
LES Models for Turbulence
Instead of DNS, "Large-Eddy Simulation" (LES) explicitly resolves eddies for large scales, while for small scales, turbulence modeling is used (subgrid-scale modeling). It has severe limitations in the near-wall regions. In these areas, the computational effort required for the boundary layer increases rapidly, as the turbulence length scale shrinks and requires finer mesh. However, for free shear flows, where the large eddies are at the same order of magnitude as the shear layer and strongly anisotropic, LES may provide extremely reliable results. This is useful to resolve problems such as flow-induced vibrations, etc.
Various subgrid-scale models are used in LES. The original and widely used Smagorinski model has its limitations in near-wall regions. The WALE (wall adapting local eddy viscosity) model overcomes these limitations and prevents damping of turbulence close to surfaces.
RANS Models for Turbulence
For most practical CFD problems, the computational costs of DNS and, to a lesser extent, LES are too high. Instead, the "Reynolds-Averaged Navier-Stokes" (RANS) equations method is much more affordable. RANS is based on the Reynolds decomposition, according to which a flow variable is decomposed into mean and fluctuating components. When the decomposition is applied to Navier-Stokes equations, an extra term known as the "Reynolds Stress Tensor" arises and a system of equations needs to be “closed”. Levels of RANS turbulence models are related to the number of differential equations added to RANS equations in order to “close” them. [3]
The most popular two-equation models are k-ε and k-ω, each with its advantages and disadvantages. A representative of the one-equation models, “Spalart-Allmaras” (SA) turbulence model, was developed specifically for aerodynamic flows and is also used often in the global hybrid methods (see the subchapter [#GlobalHybridModelsForTurbulence Global hybrid models for turbulence]).
Spalart-Allmaras Turbulence Model
The Spalart-Allmaras model solves the modeled transport equation for the eddy turbulent viscosity νT. The equation resolves a viscosity-like variable ṽ. The variable ṽ is easier to calculate than νT directly, so the variable ṽ is first calculated numerically. Then, the eddy turbulent viscosity νT is updated using ṽ and finally added to the momentum equation to close the system of equations and to be solved. A detailed description can be found here: Spalart – Allmaras Model
k-ε Turbulence Model
The k-ε model was the first turbulence model to be widely used for a variety of flows in CFD. It is based on an analogy of the random motion of eddies in a turbulent fluid flow with random motion of particles on a molecular scale, suggested by Boussinesq. He introduced the concept of eddy viscosity, which is proportional to the characteristic speed and mixing length of the turbulence. A model is required to represent each of these scales. The k-ε model is a typical two-equation model, which solves transport equations for turbulent kinetic energy k (for the speed scale) and turbulent energy dissipation rate ε (for the dissipation time scale). [2], [3]
The k- ε model is robust and computationally cheap. It is valid for fully turbulent flows only. Therefore, it is suitable for initial iterations and parametric studies. It performs poorly for complex flows involving severe or adverse pressure gradient, separations, and strong streamline curvatures. It also behaves in a troublesome manner at boundaries.
k-ω Turbulence Model
The k-ω model “closes” the RANS system by two partial differential equations for k and ω, with the first variable being again the turbulence kinetic energy and the second being the specific rate of dissipation (of the turbulence kinetic energy k into internal thermal energy). Its physically more consistent dissipation term gives the k-ω model an advantage over the k-ε model in the near-wall region. It also has good performance for free shear and low Reynolds number flows. It is more suitable for complex boundary layer flows and separation in external aerodynamics (however, the flow separation is typically calculated as being too excessive and early, and therefore requires high mesh resolution near the wall). It can also be used for transitional flows.
SST k-ω Turbulence Model
One of the most popular models in industrial CFD is the SST k-ω turbulence model (shear stress transport), which combines k-ω model near the walls and k-ε in the free stream, benefiting of advantages of both models. It was first published in 1994 by F. R. Menter, see also Wikipedia article).
The two-equation models contain many assumptions and are calibrated to work well only according to well-known features of the applications they are designed to solve. Nonetheless, their strength has proven itself, and industry CFD calculations use them widely.
URANS Turbulence Models
URANS, or unsteady RANS models, are used in industry as a fast tool for transients flow simulations. Although the approach considers the time dependence, it does not resolve the turbulent structures explicitly. The validity of URANS requires a clear separation of timescales between the resolved unsteady flow and turbulent fluctuations, which is not always guaranteed, and a rigorous justification is often lacking M. D. Israel, 2022.
Global Hybrid Models for Turbulence
For more complex problems, where advantages of the above-mentioned methods are required, but the computational costs must remain reasonable, "global hybrid methods" can be used. The Global hybrid methods are based on a combination of LES and RANS methods, switching them as the resolution level changes. RANS is applied in the boundary layers, where LES would have high computational costs, while large eddies in free stream are resolved by LES, which is able to model anisotropic turbulent structures significantly better than RANS. In other words, the regions where the turbulent length scale is less than the maximum grid dimension are using the RANS mode of solution. As the turbulent length scale exceeds the grid dimension, the regions are solved using the LES mode, thereby cutting the computational costs significantly, yet still offering some of the advantages of the LES method in separated regions. The most popular models are "Detached Eddy Simulation" (DES) or "Delayed Detached Eddy Simulation" (DDES).
Spalart-Allmaras DDES Model
A widely used example is the “Spalart-Allmaras Delayed Detached Eddy Simulation”, see OpenFOAM®.
The main improvement of the "Delayed Detached Eddy Simulation" (DDES) is to include the turbulent viscosity information into the switching mechanism of RANS/LES to delay this switching in boundary layers. The RANS system is “closed” by one eddy-viscosity transport equation according to the "Spalart-Allmaras model" with incorporated model length scale to the wall distance.
Turbulence in RWIND 3
The turbulence models in RWIND 3 can be divided to two groups - models used for steady flow or transient flow simulations.
Steady Flow
Although it is clear, that the fluctuation in turbulence is a time varying phenomena, many flow patterns can be considered as so called statistically steady state, where the turbulence is typically assumed to be isotropic and modelled by RANS models. Then, a steady flow calculation with modeled turbulence can be applied.
For steady flow calculations, RWIND 3 offers k-ε and SST k–ω RANS models.
k-ε model is robust and computationally cheap, but not very accurate, especially in the near-wall regions. Therefore, it is recommended for initial and parametric studies.
SST k–ω turbulence model performs better in near-wall regions (which is in focus in civil engineering applications), but the computational costs are higher and the convergence is more sensitive. The near wall regions must be resolved with sufficiently fine mesh.
Transient Flow
The turbulence models for transient calculation in RWIND 3 are following - URANS models ( k-ε and k–ω), Spalart-Allmaras DDES and LES.
For most applications, we recommend to use the Spalart-Allmaras DDES model. This models gives good results for anisotropic flow structures in free stream using LES, but maintains the computational costs reasonable by using RANS model in near-wall region and thus avoiding very fine meshes there.
As a quick and cheap option, URANS (unsteady RANS) models are available in RWIND 3. Although they are computationally cheaper than other options, we must note, that they should be used only for initial studies and rough estimates.
Since RWIND 3.06, a pure LES turbulence model is available. A WALE (wall-adapting local eddy-viscosity) subgrid-scale model is adopted. In order to perform a correct simulation with LES, we recommend this option only to advanced users. The mesh quality must be very high and justified by turbulent kinetic energy distribution. The simulations are very time/computationally consuming, but they are capable to predict phenomena such as vortex shedding etc.