






Die Turbulenz ist eines der komplexesten in der Natur beobachteten Phänomene, was eine präzise Definition erschwert. In einer turbulenten Strömung folgt das Fluid unregelmäßigen, gekrümmten Pfaden, den sogenannten Wirbeln (Eddies). Im Allgemeinen ist die Strömung ineinander verschlungen und bildet Strömungsstrukturen vieler verschiedener Größen. Diese bewegen und rotieren kontinuierlich, interagieren untereinander sowie mit dem Hauptströmungsfeld und verändern rasch ihre Form und Größe. Die Vermischung ist erheblich und beeinflusst die Impulsdiffusion. Infolgedessen wirkt sie sich auf die aerodynamischen Kräfte im Fluid sowie auf die Lastbilder auf Hindernisse in der Strömung aus. Wenn Sie dieses komplexe Phänomen untersuchen möchten, empfehlen wir Ihnen folgende Einführung in die Turbulenz: Introduction to Turbulence. [1]
Turbulente Strukturen verursachen Wirbelstärke im Fluid; die physikalische Größe "Wirbelstärke" wird oft anstelle der Geschwindigkeit zur Beschreibung von Turbulenz verwendet.
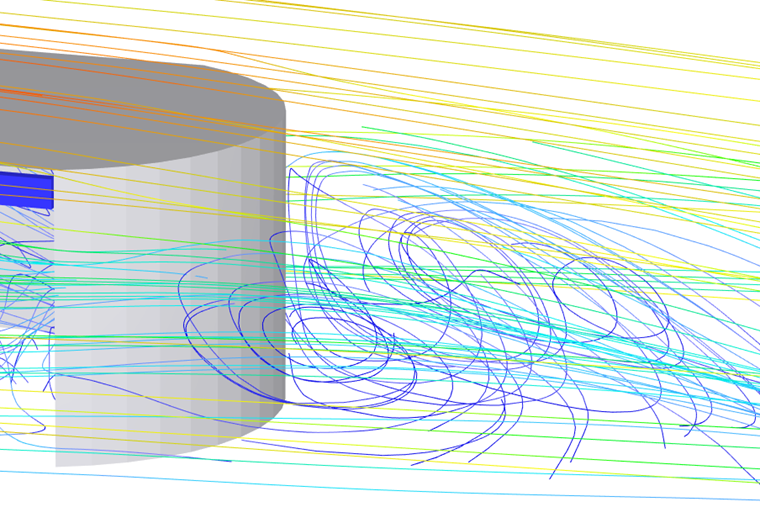
Vortexbildung findet in erster Linie an festen Grenzen statt. In Grenzschichten, die sich entlang dieser Grenzen bilden, variiert die Geschwindigkeit von Null an der Grenze (Haftbedingung) bis zu einem Wert, der im Wesentlichen unabhängig von der Grenze ist und durch die freie Strömung bestimmt wird. Turbulenz tritt auf, wenn Instabilitäten – wie etwa die Rauheit der Grenzfläche – dazu führen, dass die Vortizität chaotisch wird und durch eine ausreichend hohe Reynolds-Zahl aufrechterhalten wird. Wenn sich eine Grenzschicht von der Grenze ablöst, werden die Vortizität und die Turbulenz in Fluidbereiche abseits fester Grenzen getragen. Große Wirbel sind in der Regel anisotrop (so führt die Strömung um einen Zylinder beispielsweise zum Ablösen von Wirbeln). Strömungsstörungen lösen Instabilitäten aus, die dazu führen, dass sich Wirbel strecken, komprimieren und schließlich verschwinden. Kohärente Strömungsstrukturen zerfallen rasch in eine Masse turbulenter Wirbel, die zunehmend isotrop auf kleiner Skala werden. Große Wirbel werden kleiner, bis sie eine Größe erreichen, bei der die Dissipation ihrer kinetischen Energie durch Viskosität signifikant wird. Der Verlust an kinetischer Energie führt schließlich dazu, dass diese Wirbel verschwinden. [2]
Für ein inkompressibles Fluid folgt die Vortizität der Transportgleichung.
Numerische Modellierung der Turbulenz
Um Turbulenz mittels numerischer Modellierung vollständig zu erfassen, müssen die Bewegungsgleichungen für die Fluidströmung auf allen räumlichen und zeitlichen Skalen gelöst werden. Es existiert keine geeignete universelle Methode.
Die exakte Methode, welche die Strömung mithilfe der maßgebenden Strömungsgleichungen für alle Skalen berechnet – bezeichnet als "Direkte Numerische Simulation" (DNS) –, ist aufgrund ihrer Rechenkosten für die praktische CFD nicht anwendbar. Die von der DNS benötigten Rechenressourcen übersteigen bei Weitem die Kapazität der leistungsstärksten derzeit verfügbaren Supercomputer.
LES-Modelle für Turbulenz
Anstelle der DNS löst die "Großstruktur-Simulation" (Large-Eddy Simulation, i.e. LES) Wirbel auf großen Skalen explizit auf, während für kleine Skalen eine Turbulenzmodellierung (Feinstrukturmodellierung) zum Einsatz kommt. Die LES weist jedoch erhebliche Einschränkungen in wandnahen Bereichen auf. In diesen Zonen steigt der Rechenaufwand für die Grenzschicht rapide an, da die Turbulenzlängenskala schrumpft und ein feineres Netz erfordert. Bei freien Scherströmungen, bei denen die großen Wirbel in der gleichen Größenordnung wie die Scherschicht liegen und stark anisotrop sind, kann die LES hingegen äußerst zuverlässige Ergebnisse liefern. Dies ist nützlich, um Probleme wie strömungsinduzierte Schwingungen u.s.ä. zu lösen.
In der LES werden verschiedene Feinstrukturmodelle verwendet. Das ursprüngliche und weit verbreitete Smagorinsky-Modell stößt in wandnahen Bereichen an seine Grenzen. Das WALE-Modell (Wall Adapting Local Eddy Viscosity) überwindet diese Einschränkungen und verhindert das Dämpfen der Turbulenz nahe Oberflächen.
RANS-Modelle für Turbulenz
Für die meisten praktischen CFD-Probleme sind die Rechenkosten der DNS und, in geringerem Maße, der LES zu hoch. Stattdessen ist die Methode der "Reynolds-gemittelten Navier-Stokes-Gleichungen" (RANS) deutlich kostengünstiger. RANS basiert auf der Reynoldsschen Zerlegung, nach welcher eine Strömungsvariable in einen Mittelwert und einen fluktuierenden Anteil zerlegt wird. Wird diese Zerlegung auf die Navier-Stokes-Gleichungen angewendet, entsteht ein zusätzlicher Term, der als "Reynolds-Spannungstensor" bezeichnet wird, und das Gleichungssystem muss "geschlossen" werden. Die verschiedenen Stufen von RANS-Turbulenzmodellen hängen von der Anzahl der Differentialgleichungen ab, die den RANS-Gleichungen hinzugefügt werden, um diese zu "schließen". [3]
Die beliebtesten Zwei-Gleichungs-Modelle sind k-ε und k-ω, jeweils mit ihren Vor- und Nachteilen. Ein Vertreter der Ein-Gleichungs-Modelle, das "Spalart-Allmaras" (SA) Turbulenzmodell, wurde speziell für aerodynamische Strömungen entwickelt und wird auch häufig in globalen Hybridverfahren eingesetzt (siehe Unterkapitel [#GlobalHybridModelsForTurbulence]).
Spalart-Allmaras-Turbulenzmodell
Das Spalart-Allmaras-Modell löst die modellierte Transportgleichung für die turbulente Wirbelviskosität νT. Die Gleichung löst eine viskositätsähnliche Variable ṽ auf. Die Variable ṽ ist einfacher zu berechnen als νT direkt, weshalb die Variable ṽ zuerst numerisch berechnet wird. Anschließend wird die turbulente Wirbelviskosität νT mithilfe von ṽ aktualisiert und schließlich der Impulsgleichung hinzugefügt, um das Gleichungssystem zu "schließen" und gelöst zu werden. Eine detaillierte Beschreibung finden Sie hier:
Spalart – Allmaras Model
k-ε-Turbulenzmodell
Das k-ε-Modell war das erste Turbulenzmodell, das für eine Vielzahl von Strömungen in der CFD weit verbreitet eingesetzt wurde. Es basiert auf einer von Boussinesq vorgeschlagenen Analogie zwischen der ungeordneten Bewegung von Wirbeln in einer turbulenten Fluidströmung und der ungeordneten Bewegung von Teilchen auf molekularer Skala. Er führte das Konzept der Wirbelviskosität ein, die proportional zur charakteristischen Geschwindigkeit und der Mischungslänge der Turbulenz ist. Ein Modell ist erforderlich, um jede dieser Skalen darzustellen. Das k-ε-Modell ist ein typisches Zwei-Gleichungs-Modell, das Transportgleichungen für die turbulente kinetische Energie k (für die Geschwindigkeit-Skala) und die turbulente Energiedissipationsrate ε (für die Dissipation-Zeitskala) löst. [2], [3]
Das k-ε-Modell ist robust und rechentechnisch günstig. Es ist ausschließlich für voll turbulente Strömungen gültig. Daher eignet es sich für erste Iterationen und parametrische Studien. Bei komplexen Strömungen mit starken oder ungünstigen Druckgradienten, Ablösungen und starken Stromlinienkrümmungen erbringt es eine schlechte Leistung. Zudem weist es an Grenzen ein problematisches Verhalten auf..
k-ω-Turbulenzmodell
Das k-ω-Modell "schließt" das RANS-System durch zwei partielle Differentialgleichungen für k und ω, wobei die erste Variable wieder die turbulente kinetische Energie ist und die zweite die spezifische Dissipationsrate (der turbulenten Kinetischen Energie k in innere thermische Energie). Sein physikalisch konsistenterer Dissipationsterm verleiht dem k-ω-Modell einen Vorteil gegenüber dem k-ε-Modell im wandnahen Bereich. Es zeigt auch eine gute Leistung bei freien Scherströmungen und Strömungen mit niedrigen Reynolds-Zahlen. Es ist besser geeignet für komplexe Grenzschichtströmungen und Ablösungen in der Außen-Aerodynamik (die Strömungsablösung wird jedoch typischerweise als zu ausgeprägt und zu früh berechnet und erfordert daher eine hohe Netzauflösung in Wandnähe). Es kann auch für Übergangsströmungen verwendet werden.
SST-k-ω-Turbulenzmodell
Eines der beliebtesten Modelle in der industriellen CFD ist das SST-k-ω-Turbulenzmodell (Shear Stress Transport), welches das k-ω-Modell in Wandnähe und das k-ε-Modell in der freien Strömung kombiniert und so von den Vorteilen beider Modelle profitiert. Es wurde erstmals 1994 von F. R. Menter veröffentlicht, siehe auch den Wikipedia-Artikel [https://en.wikipedia.org/wiki/K–omega_turbulence_model).
Die Zwei-Gleichungs-Modelle enthalten viele Annahmen und sind so kalibriert, dass sie nur entsprechend den bekannten Merkmalen der Anwendungen gut funktionieren, für deren Lösung sie entwickelt wurden. Dennoch hat sich ihre Stärke bewährt, und in industriellen CFD-Berechnungen werden sie weit verbreitet eingesetzt.
URANS-Turbulenzmodelle
URANS (oder instationäre RANS-Modelle) werden in der Industrie als schnelles Werkzeug für transiente Strömungssimulationen eingesetzt. Obwohl dieser Ansatz die Zeitabhängigkeit berücksichtigt, werden die turbulenten Strukturen nicht explizit aufgelöst. Die Gültigkeit von URANS setzt eine klare Trennung der Zeitskalen zwischen der aufgelösten instationären Strömung und den turbulenten Fluktuationen voraus. Dies ist jedoch nicht immer gewährleistet und eine fundierte Begründung dafür fehlt oft M. D. Israel, 2022.
Globale Hybridmodelle für Turbulenz
Für komplexere Probleme, bei denen die Vorteile der oben genannten Methoden erforderlich sind, die Rechenkosten jedoch in einem vernünftigen Rahmen bleiben müssen, können "globale Hybridverfahren" eingesetzt werden. Die globalen Hybridverfahren basieren auf einer Kombination von LES- und RANS-Methoden, wobei zwischen ihnen umgeschaltet wird, wenn sich das Auflösungsniveau ändert. RANS wird in den Grenzschichten angewendet, wo LES hohe Rechenkosten verursachen würde, während große Wirbel in der freien Strömung durch LES aufgelöst werden, welche anisotrope turbulente Strukturen wesentlich besser modellieren kann als RANS.Mit anderen Worten: In Regionen, in denen die turbulente Längenskala kleiner als die maximale Gitterabmessung ist, wird der RANS-Lösungsmodus angewendet. Sobald die turbulente Längenskala die Gitterabmessung überschreitet, werden diese Bereiche im LES-Modus gelöst, wodurch die Rechenkosten erheblich gesenkt werden, während in Ablösegebieten dennoch einige der Vorteile der LES-Methode erhalten bleiben. Die beliebtesten Modelle sind "Detached Eddy Simulation" (DES) oder "Delayed Detached Eddy Simulation" (DDES).
Spalart-Allmaras DDES-Modell
Ein weit verbreitetes Beispiel ist die "Spalart-Allmaras Delayed Detached Eddy Simulation", siehe OpenFOAM®.
Die wichtigste Verbesserung der "Delayed Detached Eddy Simulation" (DDES) besteht darin, die Information über die turbulente Viskosität in den Umschaltmechanismus zwischen RANS und LES einzubeziehen, um dieses Umschalten in Grenzschichten zu verzögern. Das RANS-System wird durch eine Transportgleichung für die Wirbelviskosität nach dem "Spalart-Allmaras-Modell" "geschlossen", bei dem die Modell-Längenskala in den Wandabstand integriert ist.
Turbulenz in RWIND 3
Die Turbulenzmodelle in RWIND 3 können in zwei Gruppen unterteilt werden - Modelle, die für stationäre Strömungen verwendet werden, und Modelle für transiente Strömungssimulationen.
Stationäre Strömung
Obwohl klar ist, dass die Fluktuation bei Turbulenzen ein zeitlich veränderliches Phänomen ist, können viele Strömungsbilder als sogenannter "statistisch stationärer Zustand" betrachtet werden, bei dem die Turbulenz typischerweise als isotrop angenommen und durch RANS-Modelle modelliert wird. In diesem Fall kann eine stationäre Strömungsberechnung mit modellierter Turbulenz angewendet werden.
Für stationäre Strömungsberechnungen bietet RWIND 3 die RANS-Modelle k-ε und SST k–ω an. Das k-ε-Modell ist robust und rechentechnisch günstig, aber nicht sehr genau, insbesondere in wandnahen Bereichen. Daher wird es für erste Iterationen und parametrische Studien empfohlen. Das SST-k–ω-Turbulenzmodell erbringt eine bessere Leistung in wandnahen Bereichen (die bei Anwendungen im Bauwesen im Fokus stehen), aber die Rechenkosten sind höher und die Konvergenz ist empfindlicher. Die wandnahen Bereiche müssen mit einem ausreichend feinen Netz aufgelöst werden.
Transiente Strömung
Die Turbulenzmodelle für transiente Berechnungen in RWIND 3 sind folgende - URANS-Modelle (k-ε und k–ω), Spalart-Allmaras DDES und LES.
Für die meisten Anwendungen empfehlen wir die Verwendung des Spalart-Allmaras-DDES-Modells. Dieses Modell liefert gute Ergebnisse für anisotrope Strömungsstrukturen in der freien Strömung mittels LES, hält jedoch die Rechenkosten in einem vernünftigen Rahmen, indem es das RANS-Modell im wandnahen Bereich verwendet und dort somit sehr feine Netze vermeidet.
Als schnelle und günstige Option stehen in RWIND 3 URANS-Modelle (instationäre RANS) zur Verfügung. Obwohl sie rechentechnisch günstiger als andere Optionen sind, müssen wir anmerken, dass sie nur für erste Studien und grobe Schätzungen verwendet werden sollten.
Seit RWIND 3.06 ist ein reines LES-Turbulenzmodell verfügbar. Es wird ein WALE-Feinstrukturmodell (Wall-Adapting Local Eddy-Viscosity) angewendet. Um eine korrekte Simulation mit LES durchzuführen, empfehlen wir diese Option nur fortgeschrittenen Anwendern. Die Netzqualität muss sehr hoch sein und durch die Verteilung der turbulenten kinetischen Energie gerechtfertigt werden. Die Simulationen sind sehr zeit- und rechenaufwendig, aber sie sind in der Lage, Phänomene wie Wirbelablösungen usw. vorherzusagen.