






Una configuración de análisis estático (SA) especifica las reglas según las cuales se calculan los casos de carga y las combinaciones de carga.
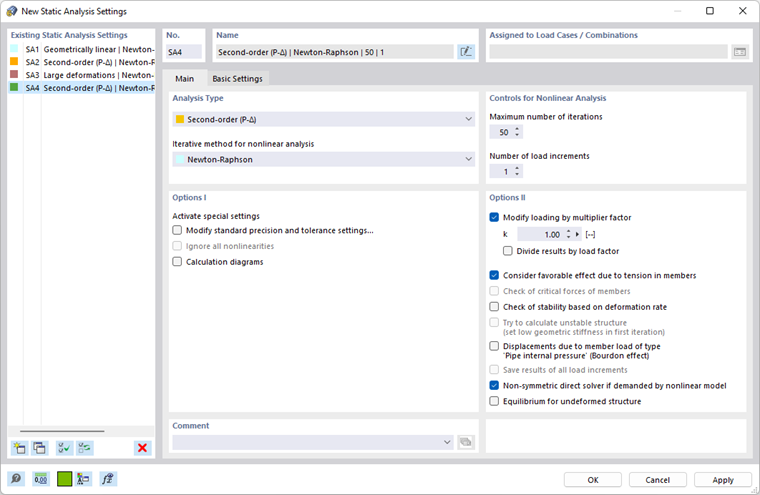
Tipos de análisis
En RFEM y RSTAB, se preestablecen tres tipos de análisis estándar:
- Geométricamente lineal
Al calcular según el análisis geométricamente lineal (primer orden), el equilibrio se analiza en un sistema estructural no deformado.
- Segundo orden
En el análisis 'estructural' de segundo orden, el equilibrio se determina en un sistema estructural deformado. Las deformaciones se suponen pequeñas.
- Grandes deformaciones
El análisis de grandes deformaciones (tercer orden o teoría de grandes deformaciones) considera los esfuerzos longitudinales y transversales en el cálculo. Después de cada paso de iteración, se crea la matriz de rigidez de un sistema deformado.
Método iterativo para análisis no lineal
Dependiendo del tipo de análisis, hay varios métodos disponibles para resolver el sistema de ecuaciones algebraicas no lineales.
- Newton-Raphson
Se preestablece la aproximación según Newton-Raphson para el análisis de grandes deformaciones. El sistema de ecuaciones no lineal se resuelve numéricamente por medio de aproximaciones iterativas con tangentes.
- Picard
El método según Picard, también conocido como método de la secante, se puede entender como una aproximación en diferencias finitas del método de Newton-Raphson. Se considera la diferencia entre la ejecución de la iteración actual y original en el paso de incremento de carga actual.
- Newton-Raphson combinado con Picard
Primero se aplica la aproximación según Picard. Después de algunas iteraciones, se cambia al método de Newton-Raphson.
- Newton-Raphson con análisis poscrítico
Este método es útil para resolver problemas poscríticos donde hay un rango de inestabilidad que superar.
- Relajación dinámica
El método final es adecuado para cálculos según el análisis de grandes deformaciones y para la resolución de problemas relacionados con las cuestiones poscríticas. En esta aproximación, se introduce un parámetro de tiempo artificial. Considerando la inercia y la amortiguación, el fallo se puede manejar como un problema dinámico.