






На вкладке Параметры и опции вы можете настроить значение ускорения свободного падения, геометрические допуски объектов и ориентацию осей.

Параметры
В этом разделе вы можете проверить значение 'ускорения падения' g. Оно используется для определения собственного веса стержней, преобразования масс ("константа преобразования масс") и для динамических расчетов. По умолчанию задано приближенное значение 10.00 м/с2, которое при необходимости можно изменить.
'Ориентация на север' описывает положение модели относительно основного направления сторон света. По умолчанию установлена северная ориентация 0°, что соответствует ориентации на север вдоль глобальной оси X. Если вы хотите изменить ориентацию модели, установите флажок и введите угол Φ.
Допуски модели
При моделировании или импорте данных из CAD-программы могут возникать незначительные геометрические расхождения объектов модели. RSTAB автоматически устраняет эти несоответствия, если расстояния между объектами не превышают определенные значения. Так, очень близко расположенные узлы объединяются, стержни, находящиеся вне плоскостей, интегрируются в соответствующие плоскости, а стержни с минимальным наклоном классифицируются как вертикальные.
Предустановленные допуски подходят для большинства моделей. При небольших размерах модели может потребоваться соответствующая корректировка допусков.
Опции
В этом разделе вы можете определить, будут ли в модели использоваться так называемые "представители" для стержней и наборов стержней. При активации флажков 'Представители стержней' и 'Представители наборов стержней' соответствующие вкладки будут добавлены в диалог. Они описаны в главах Представители стержней и Представители наборов стержней.
Список 'Активировать правило-основанный генератор связей' предоставляет возможность использовать генератор для связывания несвязанных объектов модели. Эта функция описана в главе Правило-основанный генератор связей. С помощью кнопки
![]() вы можете создать новый генератор, а с помощью кнопки
вы можете создать новый генератор, а с помощью кнопки
![]() - отредактировать выбранную в списке запись.
- отредактировать выбранную в списке запись.
Глобальные оси XYZ
Этот раздел определяет ориентацию глобальной оси Z. В CAD-приложениях ось Z обычно направлена вверх, в программах для расчета конструкций - вниз. Для расчета это не имеет значения.
Если Z направлена вверх, то в функции 'Активный собственный вес' в загружении (см. главу Загружения ) автоматически принимается коэффициент -1.0 по Z.
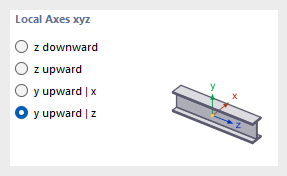
Локальные оси xyz
В нормах по-разному регламентируются обозначения осей стержня. Здесь вы можете задать, как должны быть ориентированы главные оси стержня z или y и ось сечения z, чтобы адаптировать локальные системы осей к региональным соглашениям.
Положение локальных осей стержня поясняется на графике в этом разделе.
Оценка затрат / выбросов CO2
Определение затрат и выбросов CO2 модели выполняется на основе стержневых элементов модели. Для этого используется метод, который на практике также применяется для расчета общих затрат здания. При этом модель подразделяется на такие единицы, как колонны, ригели или балки. Для этих единиц разрабатываются удельные стоимости, которые покрывают все учитываемые затраты (цена за площадь, цена за длину, цена за массу). Массы отдельных единиц (вес, объем, площадь) затем умножаются на соответствующие удельные стоимости. Таким образом получаются частичные затраты для каждой единицы. Сумма всех частичных затрат дает общие затраты модели. Оценка выбросов CO2 основана на том же подходе.
Задайте символ валюты для затрат. Стоимость за единицу вы затем можете определить в Материалы и при необходимости также для Сечения.
Коэффициенты корректировки позволяют глобально масштабировать затраты и выбросы CO2 модели. Это может быть полезно для корректировки затрат в ходе проекта.