Ustawienie analizy modalnej (MOS) określa zasady, według których obliczane są wartości własne. Domyślnie ustawione są dwa typy standardowe analizy. Możesz dostosować te typy w dowolnym momencie lub utworzyć dodatkowe ustawienia analizy modalnej.
Podstawy
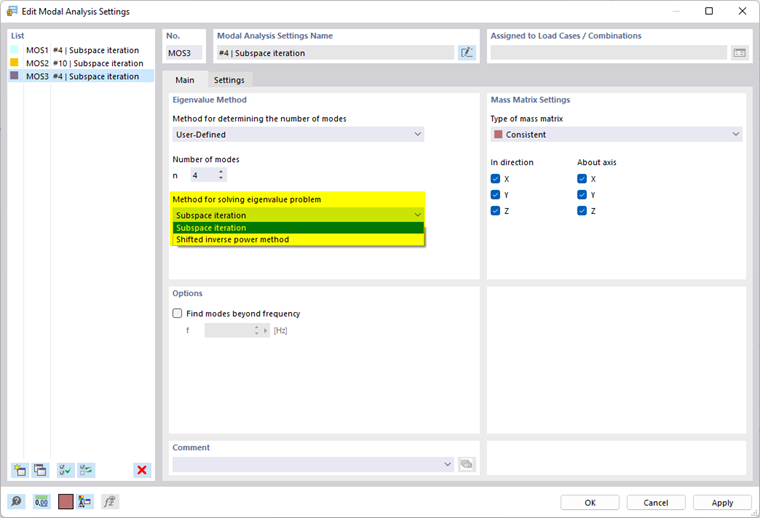
Zakładka Podstawy zarządza ustawieniami analizy modalnej oraz podstawowymi parametrami obliczeniowymi. Dla RFEM i RSTAB dostępne są różne opcje wyboru metody wartości własnych.
Metoda wartości własnych
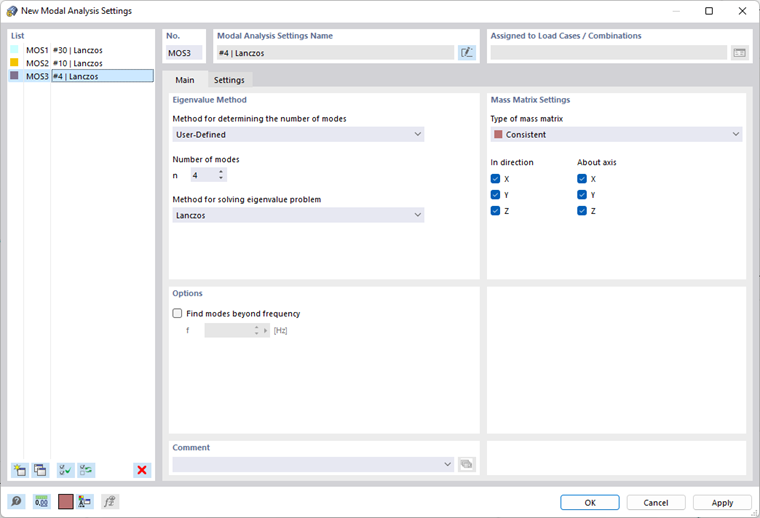
W tej sekcji możesz ustalić, jakim sposobem rozwiązywany będzie problem wartości własnych oraz ile postaci własnych będzie określonych.
Metoda wyznaczania liczby wartości własnych
Na liście dostępne są trzy możliwości do wyboru.
- Użytkownika

W metodzie użytkownika można podać liczbę najniższych postaci własnych, które mają być obliczone. Możliwych jest do 9 999 postaci własnych. Oprócz tego ograniczenia również model stanowi ograniczenie dla liczby możliwych postaci własnych: Odpowiada ona stopniom swobody wynikającym z liczby wolnych punktów mas pomnożonej przez liczbę kierunków, w których działają masy.
- Automatycznie, aby osiągnąć efektywne współczynniki mas modalnych
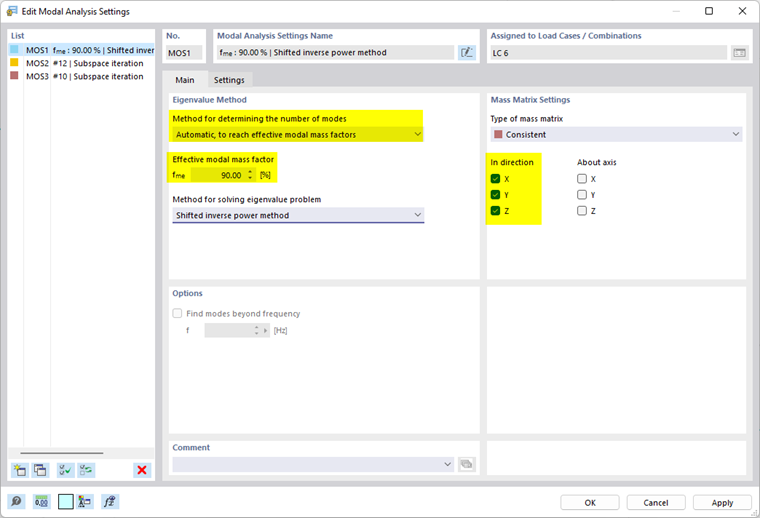
Obliczane są tak wiele postaci własnych, aż osiągnięty zostanie zaproponowany efektywny współczynnik mas modalnych. Analizowane są efektywne współczynniki mas modalnych dla zaproponowanych kierunków translacyjnych (X, Y, Z).
- Automatycznie, aby osiągnąć maksymalną częstotliwość własną
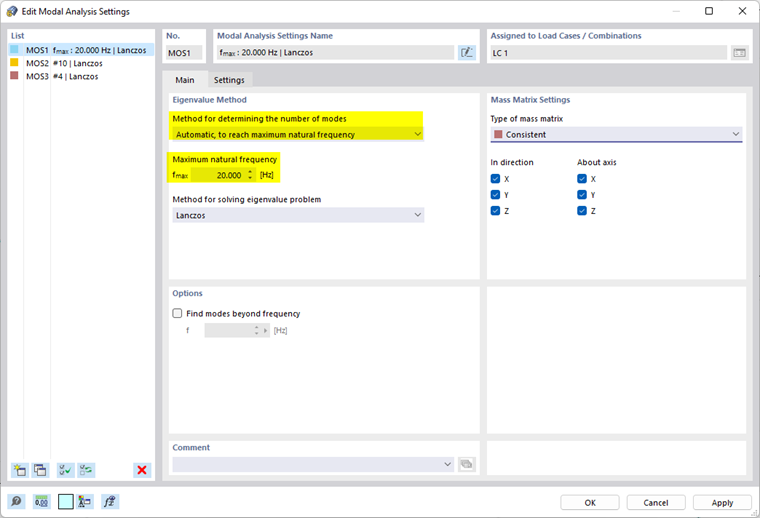
Obliczane są tak wiele postaci własnych, aż osiągnięta zostanie zaproponowana częstotliwość własna.
Metoda rozwiązania dla problemu wartości własnych (dla RFEM)
Na liście dostępne są trzy metody do wyboru w celu rozwiązania problemu wartości własnych. Jeśli ustalono automatyczną metodę wyznaczania liczby wartości własnych, dostępna jest tylko jedna metoda rozwiązania.

Więcej informacji na temat poszczególnych metod można znaleźć u Bathe [1] i Natke [2].
- Lanczos
Metoda lanczowa jest odpowiednia jako metoda iteracyjna do określania najniższych wartości własnych i odpowiadających im postaci własnych dużych modeli. Zazwyczaj przy użyciu tego algorytmu osiąga się szybka konwergencja. Można obliczyć do n–1 postaci własnych (n: liczba stopni swobody modelu z masą).
Opis wprowadzający można znaleźć na pl.wikipedia.org/wiki/Metoda_Lanczosa.
- Pierwiastek charakterystycznego wielomianu
Metoda ta polega na analitycznym rozwiązaniu problemu wartości własnych w obliczeniach bezpośrednich. Główną zaletą tej metody jest to, że wyższe wartości własne są obliczane dokładniej i że mogą być określone wszystkie wartości własne modelu. Dla większych modeli ta metoda może być relatywnie czasochłonna.
Opis wprowadzający można znaleźć na pl.wikipedia.org/wiki/Charakterystyczny_wielomian.
- Iteracja podprzestrzeni
W tej metodzie wszystkie wartości własne są określane w jednym kroku. Zakres macierzy sztywności ma w tej metodzie duży wpływ na czas obliczeń. Z tego powodu metoda ta jest zalecana dla dużych modeli FE tylko wtedy, gdy ma być obliczonych niewiele wartości własnych. Pamięć operacyjna ogranicza liczbę wartości własnych, które mogą być określone z akceptowalnym nakładem czasu.
Opis wprowadzający można znaleźć na pl.wikipedia.org/wiki/Metoda_podprzestrzeni_Krylowa.
Metoda rozwiązania dla problemu wartości własnych (dla RSTAB)
Na liście dostępne są dwie metody do wyboru w celu rozwiązania problemu wartości własnych. Jeśli ustalono jedną z automatycznych metod wyznaczania liczby wartości własnych, dostępna jest tylko jedna metoda rozwiązania.
Więcej informacji na temat poszczególnych metod można znaleźć u Bathe [1].
- Iteracja podprzestrzeni
W tej metodzie wszystkie wartości własne są określane w jednym kroku. Zakres macierzy sztywności ma w tej metodzie duży wpływ na czas obliczeń. Z tego powodu metoda ta jest zalecana dla dużych modeli FE tylko wtedy, gdy ma być obliczonych niewiele wartości własnych. Pamięć operacyjna ogranicza liczbę wartości własnych, które mogą być określone z akceptowalnym nakładem czasu.
Opis wprowadzający można znaleźć na pl.wikipedia.org/wiki/Metoda_podprzestrzeni_Krylowa.
- Iteracja odwrotna z przesunięciem
Metoda ta opiera się na założeniach dotyczących wektorów własnych postaci własnych, które podczas obliczeń iteracyjnie przybliżają się do konwergentnego rozwiązania. Zaletą tej metody jest krótki czas obliczeń dzięki szybkiej konwergencji. „Przesunięcie” oznacza, że metodą tą można określić wszystkie wyniki, które znajdują się między największą a najmniejszą wartością własną danej macierzy.
Opis wprowadzający można znaleźć na pl.wikipedia.org/wiki/Iteracja_przeciwsoborowa.
Ustawienia macierzy mas
W tej sekcji można ustalić, która macierz mas będzie używana oraz w których kierunkach lub wokół których osi masy będą działały podczas analizy modalnej.
Typ macierzy mas
Na liście znajdują się trzy typy macierzy mas do wyboru.

- Diagonalna
W macierzy mas diagonalnej M masy przyjmuje się, że są skoncentrowane na węzłach FE. Wpisy w macierzy są skoncentrowanymi masami w kierunkach translacji X, Y i Z oraz w kierunkach rotacji wokół globalnych osi X (φX), Y (φY) i Z (φZ). Przykłady dwóch przypadków:
– Macierz diagonalna tylko z translacyjnymi stopniami swobody: Jeśli aktywowane są tylko kierunki translacyjne, macierz diagonalna wygląda następująco:
– Macierz diagonalna z translacyjnymi i rotacyjnymi stopniami swobody: Jeśli aktywowane są zarówno kierunki translacyjne, jak i rotacyjne, macierz diagonalna wygląda następująco:
|
m |
Masa |
|
IX, IY, IZ |
Momenty bezwładności masy (RFEM 6) |
- Spójna
Spójna macierz mas jest pełną macierzą mas elementów skończonych. Dlatego masy nie są skoncentrowane na węzłach FE. Zamiast tego stosuje się funkcje przybliżeń dla bardziej rzeczywistego rozkładu mas w elementach skończonych. Przy tej macierzy mas brane są pod uwagę wpisy nie-diagonalne, co oznacza, że rotacja mas jest ogólnie brana pod uwagę. Spójna macierz mas wygląda w sposób następujący (funkcje przybliżeń pomijanews):
- Jednostkowa
Macierz jednostkowa zastępuje wszystkie wcześniej zdefiniowane masy. Ta macierz jest spójną macierzą, w której wszystkie elementy diagonalne wynoszą 1 kg. Masa jest umieszczana na każdym punkcie FE jako 1. Uwzględniane są translacje i rotacje mas. To matematyczne podejście powinno być używane tylko do analiz numerycznych.
Więcej informacji na temat typów macierzy, a zwłaszcza na temat użycia macierzy jednostkowej znajdziesz u Barth/Rustler [3].
W kierunku / Wokół osi
Sześć pól kontrolnych określa, w jakim kierunku lub wokół których osi masy będą działały podczas określania wartości własnych. Masy mogą działać zarówno w globalnych kierunkach przesunięć X, Y lub Z, jak i rotować wokół osi X, Y i Z. Zaznacz odpowiednie pola kontrolne. Przynajmniej jeden kierunek lub jedna oś musi być aktywowany, aby wartości własne mogły być obliczone.

Opcje
Ostatnia sekcja w zakładce 'Podstawy' oferuje ważną opcję ustawień dla analizy modalnej.
Szukać częstotliwości własnych od
Jeśli pojedyncze pręty lub powierzchnie w modelu mają bardzo małą częstotliwość własną, najpierw pojawiają się one jako lokalne postaci własne. Jeśli zaznaczysz pole kontrolne, możesz obliczać tylko te wartości własne, które są powyżej określonej wartości 'f' dla częstotliwości własnych. W ten sposób można zmniejszyć liczbę wyników i skupić się na wartościach własnych istotnych dla całego modelu.
Ustawienia
Zakładka Ustawienia zarządza dalszymi ustawieniami analizy modalnej oraz podstawowymi parametrami obliczeniowymi.
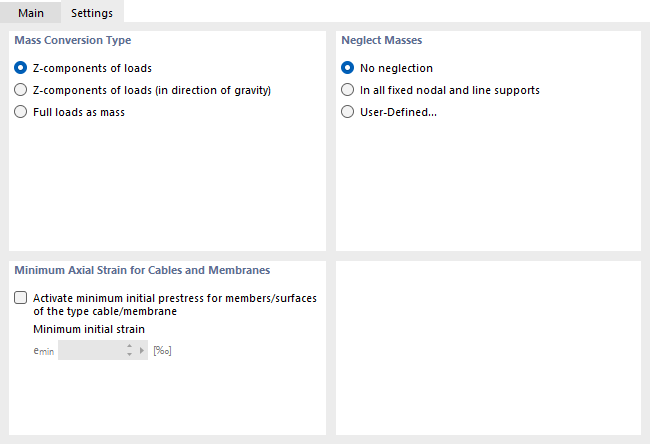
Typ przekształcenia mas
Ta sekcja reguluje import mas dla analizy modalnej. Domyślnie brane są pod uwagę tylko 'Składniki obciążenia Z'. Oznacza to komponenty obciążenia działające w obu kierunkach osi Z – pozytywnym i negatywnym.
W opcji 'Składniki obciążenia Z (w kierunku siły ciężkości)' program bierze pod uwagę tylko komponenty obciążenia działające w kierunku grawitacji. Siła grawitacyjna jest ustalona przez orientację globalnej osi Z (zobacz rozdział Orientacja osi podręcznika RFEM): Działa ona w kierunku globalnej osi Z, jeśli jest skierowana w dół. Jeśli globalna oś Z jest skierowana w górę, działa przeciwnie.
Dzięki opcji 'Pełne obciążenie jako masa' importowane są wszystkie obciążenia i ich komponenty jako masy.
Ignorowanie mas
W analizie modalnej zasadniczo brane są pod uwagę wszystkie masy zdefiniowane w modelu. Ta sekcja umożliwia pominięcie masy części modelu, na przykład masy we wszystkich stałych węzłach i łożyskach liniowych. Można także dokonać wyboru obiektów użytkownika.

W opcji 'Użytkownik' pojawia się dodatkowa zakładka 'Ignoruj masy'. Tam można określić obiekty bezmasowe.

Lista obiektów (węzły, linie, pręty itd.) może być tworzona bezpośrednio za pomocą numerów obiektów. Można również użyć przycisku
![]() w polu 'Lista obiektów', aby wybrać obiekty graficznie. Za pomocą przycisku
w polu 'Lista obiektów', aby wybrać obiekty graficznie. Za pomocą przycisku
![]() można wstępnie ustawić tylko stałe łożyska.
można wstępnie ustawić tylko stałe łożyska.
Ustal, za pomocą pól kontrolnych dla kierunków przesunięcia uX, uY i uZ oraz rotacji φX, φY i φZ, w jakim kierunku masy powinny być pominięte.
Sztywność obiektów, których masy są pomijane, jest jednak brana pod uwagę w macierzy. Jeśli ma być również pominięta sztywność tych obiektów, można użyć Modyfikacji struktury, aby indywidualnie dostosować sztywności. Alternatywnie można dezaktywować obiekty do obliczeń (zobacz rozdział Podstawy podręcznika RFEM).

Minimalna zmiana długości dla lin i membran
Dla poprawnego odwzorowania Prętów linowych i Powierzchni membranowych wymagana jest minimalna zmiana długości. Jeśli ten limit jest ustawiony zbyt nisko, osiągnięte wartości własne nie będą realistyczne, a określane będą tylko lokalne postaci własne. Domyślna wartość napięcia początkowego dla emin jest odpowiednia w większości przypadków.