






您可以在导航器中将体积结果以图形方式显示在“实体”类别下。数值化的体积结果则位于表格的“按体积列出结果”类别中。
变形
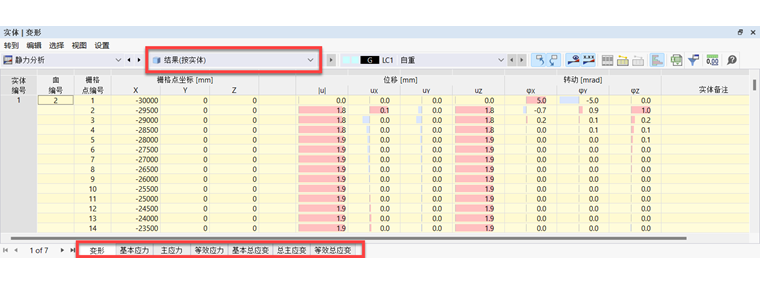
图片按体积列出结果表格显示了包含边界面变形的表格。位移和旋转值在面的栅格点处输出(参见章节 面 )。
变形含义如下:
| |u| | 总位移绝对值 |
| uX | 沿整体X轴方向的位移 |
| uY | 沿整体Y轴方向的位移 |
| uZ | 沿整体Z轴方向的位移 |
| φX | 绕整体X轴的旋转 |
| φY | 绕整体Y轴的旋转 |
| φZ | 绕整体Z轴的旋转 |
应力
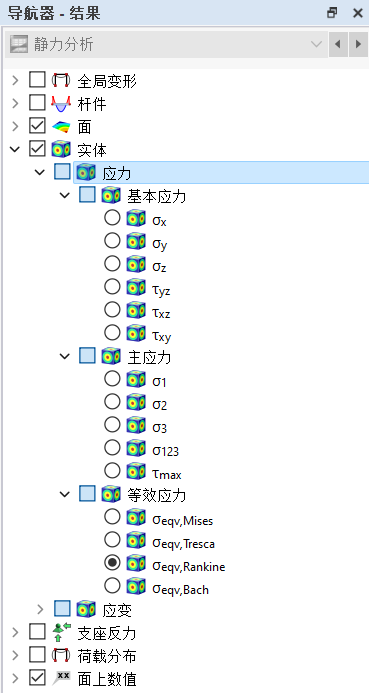
在导航器中指定应在实体的边界面上显示哪些应力。表格根据在 结果表格管理器 中设置的规格列出这些面的应力。
实体应力分为以下几类:
- 基本应力
- 主应力
- 等效应力
- 应力不变量
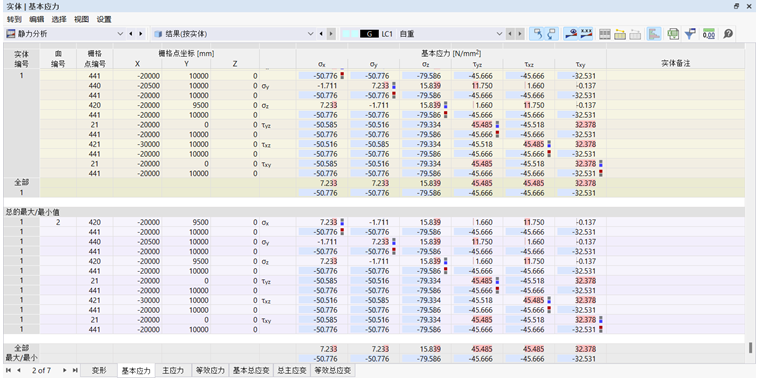
基本应力
实体应力不能像面应力那样用简单的方程式来描述。基本应力 σx、σy 和 σz 以及剪应力 τyz、τxz 和 τxy 由计算核心直接确定。
如果从多轴受力体中切出一个边长为 dx、dy 和 dz 的六面体,则每个六面体面上的应力都可以分解为轴向应力和剪应力。忽略体积力以及平行面上的应力差异,该六面体局部坐标系中的应力状态可以通过九个应力分量来描述。
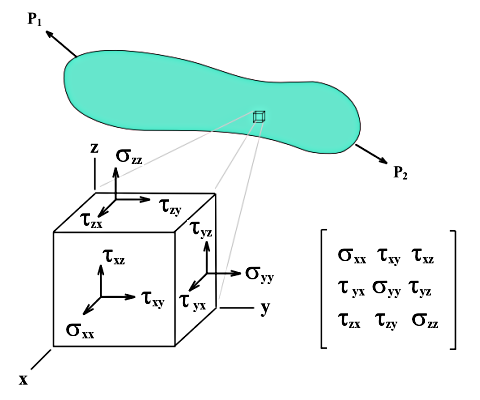
应力张量的矩阵为:
主应力
由张量的特征值得出主应力 σ1、σ2 和 σ3 如下:
最大剪应力 τmax 根据莫尔应力圆确定:
等效应力
根据 冯·米塞斯 理论的等效应力 σv 可以通过两个等效公式确定。
为了确定按 特雷斯卡 理论的等效应力 σv,需要检查主应力差,以确定其最大值。
按 兰金 理论的等效应力 σv 由主应力的最大绝对值计算得出。
为了确定按 巴赫 理论的等效应力 σv,需考虑泊松比 ν 来检查主应力差,以确定其最大值。
应力不变量
应力不变量能够对材料的应力状态进行与坐标无关,因此也是客观的描述。作为标量,它们在坐标系的任意旋转下保持不变,并独立于所选的张量表示法捕捉到这些状态与物理相关的特性。它们的特殊意义在于,许多力学现象——特别是塑性流动、失效和断裂——不依赖于单个应力分量,而是依赖于不变量的度量值。因此,应力不变量构成了许多现有流动和失效准则的基础,例如冯·米塞斯理论、特雷斯卡理论或德鲁克-普拉格理论。
平均应力 p 与第一应力不变量 I1 相关,描述的是静水应力。它由三个主应力的算术平均值计算得出,并表征了应力点在主空间对角线上离坐标原点的距离。
它描述了平均轴向应力状态,并且主要负责体积变化。物理上,p 对应于一个均匀的受压或受拉状态,该状态不会导致形状调整,只会引起压缩或膨胀。在许多材料中,特别是在土力学和岩石力学以及压敏材料中,p 极大地影响强度和变形行为。
偏应力 q 与应力偏张量的第二不变量 J2 相关。它计算如下:
它描述了应力状态中负责形状调整(剪切变形)而不改变体积的部分。偏应力部分尤其驱动塑性材料和韧性材料的塑性流动和失效。冯·米塞斯屈服准则直接基于 J2 或 q,并清楚地表明塑性变形主要受偏应力控制。
洛德角 θ 表示应力点在偏平面上的位置。偏平面被分为六个扇区,因此 −30° ≤ θ ≤ 30°。该角度确定如下:
|
J2 |
第二偏应力不变量: 1/6 [(σ1 – σ2)2 + (σ2 – σ3)2 + (σ3 – σ2)2] |
|
J3 |
第三偏应力不变量: 1/27 (2σ1 – σ2 – σ3) (2σ2 – σ3 – σ1) (2σ3 – σ1 – σ2) |
当 θ = 0 时,产生纯剪应力状态;而当 θ = 30° 时,产生应力状态 σ1 > σ2 = σ3,对应于三轴压缩试验。当 θ = −30° 时,产生三轴拉伸试验的应力状态,即 σ1 < σ2 = σ3。
应变
在导航器中指定应在实体边界面上显示哪些应变。表格根据在 结果表格管理器 中设置的规格列出这些面的应变。
实体应变分为以下几类:
- 基本总应变
- 主总应变
- 等效总应变
- 应变不变量
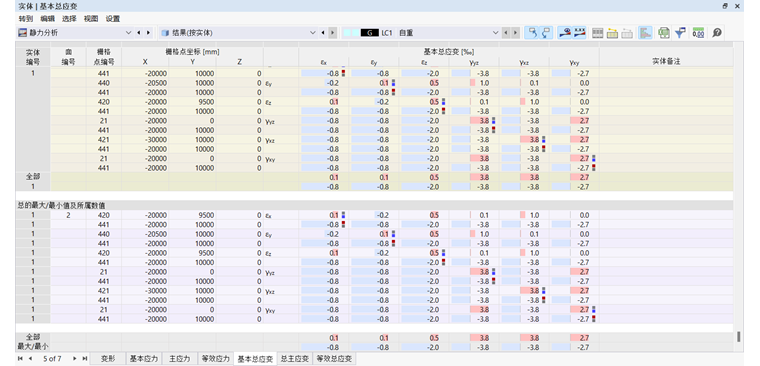
基本总应变
基本总应变,包括剪应变,由计算核心直接确定。对于空间应变状态,张量的一般定义为:
张量的元素定义如下:
主总应变
主总应变 ε1、ε2 和 ε3 由基本应变确定。
等效总应变
等效总应变 εv 根据四种不同的应力假说确定如下。
应变不变量
应变不变量是应变张量的特征值,它们与坐标系的取向无关。它们能够明确区分材料的体积变化和形状调整。这种区分对于分析材料行为、强度准则和塑性模型至关重要。
体积应变不变量 εv 对应于总应变的各向同性部分。它由主应变计算得出:
偏应变 εq 或剪应变 γs 描述了纯形状调整而不包含体积变化。它们计算如下: