






You can display the results for solids graphically via the navigator category Solids. The numerical solid results can be found in the table category Results by Solid.
.png?mw=760&hash=71627fe33fddc42ab64faca4d036ceecb28da92c)
Deformations
The image Results by solid in table shows the table with the deformations of the boundary surfaces. The displacements and rotations are displayed at the surface grid points (see the chapter Surfaces ).
The deformations mean:
| |u| | Absolute value of total displacement |
| uX | Displacement in direction of global X-axis |
| uY | Displacement in direction of global Y-axis |
| uZ | Displacement in direction of global Z-axis |
| φX | Rotation about the global X-axis |
| φY | Rotation about the global Y-axis |
| φZ | Rotation about the global Z-axis |
Stresses
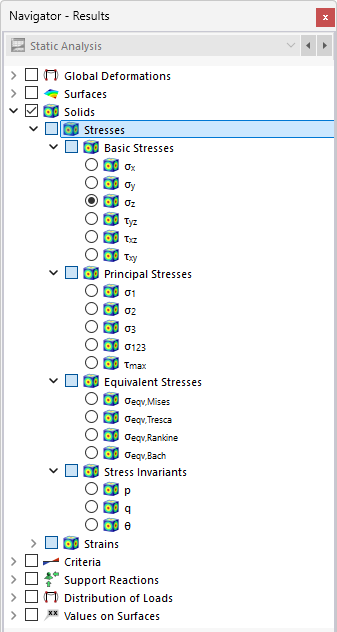
.png?mw=760&hash=b95435bbf9c07c7f89896b47d2be8a7f2444ee35)
Specify in the navigator which stresses you want to display on the boundary surfaces of the solids. The table lists the stresses of these surfaces according to the specifications set in the Results Table Manager .
The solid stresses are divided into the following categories:
- Basic stresses
- Principal stresses
- Equivalent stresses
- Stress invariants
Basic Stresses
Solid stresses cannot be described with simple equations like surface stresses. The basic stresses σx, σy, and σz including the shear stresses τyz, τxz, and τxy are determined directly by the calculation kernel.
If a cube with the lengths of edges dx, dy, and dz is cut out of a body with multi-axial loading, the stresses in each cube surface can be decomposed into normal and shear stresses. If we ignore the space force and also the stress differences on parallel surfaces, the stress condition in the local coordinate system of the cube can be described by nine stress components.
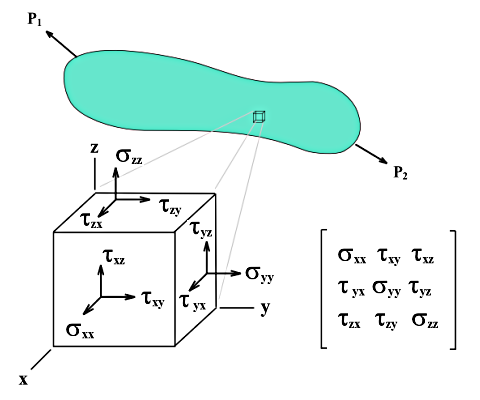
The matrix of the stress tensor is:
Principal Stresses
The principal stresses σ1, σ2, and σ3 result from the eigenvalues of the tensor as follows:
The maximum shear stress τmax is determined according to the Mohr's circle:
Equivalent Stresses
The equivalent stresses σv according to von Mises can be determined by two equivalent formulas.
To determine the equivalent stress σv according to Tresca , the differences of the principal stresses are examined to determine the maximum value.
The equivalent stress σv according to Rankine is determined from the largest absolute values of the principal stresses.
To determine the equivalent stress σv according to Bach , the principal stress differences are examined considering Poisson's ratio ν to determine the maximum value.
Stress Invariants
Stress invariants allow a coordinate-independent and thus objective description of the material's stress condition. As scalar quantities, they remain unchanged under any rotations of the coordinate system and capture the physically relevant properties of these conditions independently of the chosen tensor representation. Their particular importance lies in the fact that many mechanical phenomena – especially plastic yielding, damage, and failure – do not depend on individual stress components, but on invariant measures. Thus, stress invariants form the basis of numerous established yield and failure criteria, such as the von Mises, Tresca, or Drucker-Prager theories.
The mean stress p is linked to the first stress invariant I1 and describes the hydrostatic stress. It results from the arithmetic mean of the three principal stresses and maps the distance of the stress point from the coordinate origin on the space diagonal.
It characterizes the mean normal stress condition and is significantly responsible for volume changes. Physically, p corresponds to a uniform compressive or tensile condition, which causes no shape modification, only compression or dilation. In many materials, especially in soil and rock mechanics and in pressure-sensitive materials, p significantly influences the strength and deformation behavior.
The deviatoric stress q is linked to the second invariant of the stress deviator J2. It is determined as follows:
|
I1 |
First stress invariant |
|
I2 |
Second stress invariant |
|
J2 |
Second deviatoric stress invariant |
It describes the part of the stress condition responsible for shape modifications (shear distortions) without changing the volume. The deviatoric part particularly drives plastic yielding and failure in ductile materials. The von Mises yield criterion is based directly on J2 or q and clarifies that plastic deformation is primarily controlled by deviatoric stresses.
The Lode angle θ indicates the position of the stress point in the deviator plane. The deviator plane is divided into six sectors, so that −30° ≤ θ ≤ 30° applies. The angle is determined as follows:
|
J2 |
Second deviatoric stress invariant: 1/6 [(σ1 – σ2)2 + (σ2 – σ3)^2 + (σ3 – σ2)2] |
|
J3 |
Third deviatoric stress invariant: 1/27 (2σ1 – σ2 – σ3) (2σ2 – σ3 – σ1) (2σ3 – σ1 – σ2) |
A pure shear stress results for θ = 0, while for θ = 30° the stress condition σ1 > σ2 = σ3 occurs, which corresponds to a triaxial compression test. From θ = −30°, the stress condition of a triaxial tensile test results with σ1 < σ2 = σ3.
Strains
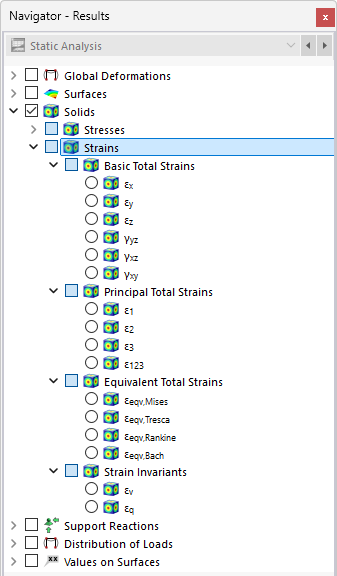
Specify in the navigator which strains you want to display on the boundary surfaces of the solids. The table lists the expansions of these surfaces according to the specifications set in the Results Table Manager .
The solid strains are divided into the following categories:
- Basic total strains
- Principal total strains
- Equivalent total strains
- Strain invariants
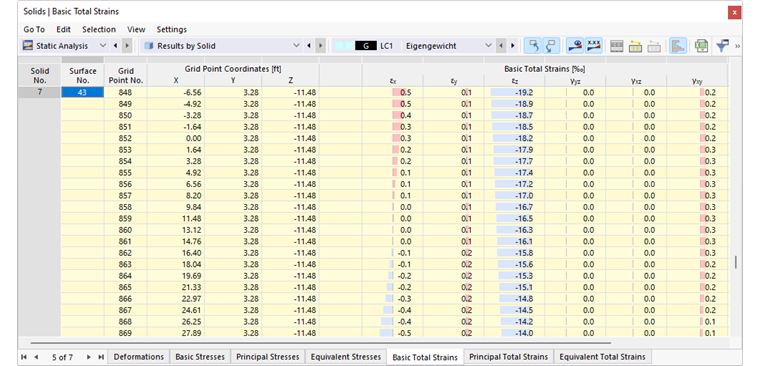
Basic Total Strains
The basic total strains including the shear distortions are determined directly by the calculation kernel. For the spatial strain condition, the general definition of the tensor is:
The elements of the tensor are defined as follows:
Principal Total Strains
The principal total strains ε1, ε2, and ε3 are determined from the basic strains.
Equivalent Total Strains
The equivalent total strains εv are determined according to four different stress hypotheses as follows.
|
R |
Matrix (see below) |
|
R |
Matrix (siehe unten) |
|
R |
Matrix (see below) |
Strain Invariants
Strain invariants are characteristic values of the strain tensor that remain independent of the orientation of the coordinate system. They enable a clear separation between volume change and shape modification of a material. The distinction is central for the analysis of material behavior, strength criteria, and plasticity models.
The volumetric strain invariant εv corresponds to the isotropic part of the total strains. It is determined from the principal strains:
The deviatoric strains εq or also shear strains γs describe the pure shape modification without volume change. They are determined as follows: