






Vous pouvez afficher les résultats pour les solides graphiquement via la catégorie du Navigateur Solide. Les résultats numériques des solides se trouvent dans la catégorie de tableau Résultats par solide.

Déformations
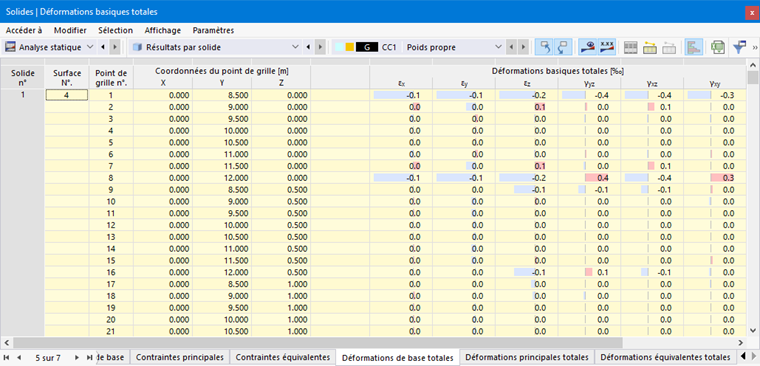
L'image Résultats par solide dans le tableau montre le tableau avec les déformations des surfaces limites. Les déplacements et les rotations sont affichés aux points de la grille de surface (voir le chapitre Surfaces ).
Les déformations signifient :
| |u| | Valeur absolue du déplacement total |
| uX | Déplacement dans la direction de l'axe X global |
| uY | Déplacement dans la direction de l'axe Y global |
| uZ | Déplacement dans la direction de l'axe Z global |
| φX | Rotation autour de l'axe X global |
| φY | Rotation autour de l'axe Y global |
| φZ | Rotation autour de l'axe Z global |
Contraintes
Définissez dans le Navigateur les contraintes qui doivent être affichées sur les surfaces limites des solides. Le tableau répertorie les contraintes de ces surfaces selon les spécifications définies dans le Gestionnaire de tableaux de résultats .
Les contraintes de solide sont divisées en catégories suivantes :
- Contraintes de base
- Contraintes principales
- Contraintes équivalentes
- Invariants de contraintes
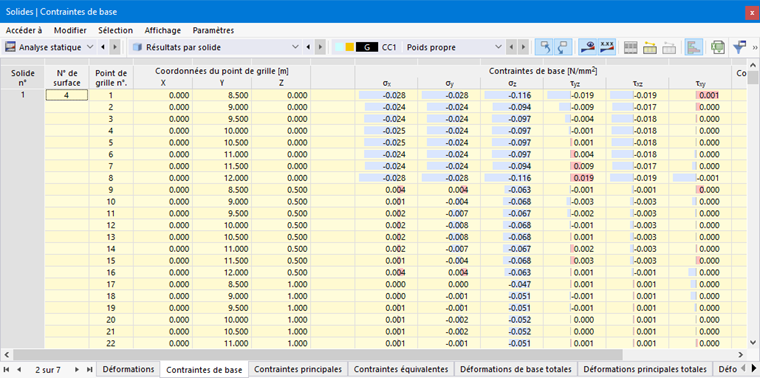
Contraintes de base
Les contraintes de solide ne peuvent pas être décrites avec des équations simples comme les contraintes de surface. Les contraintes de base σx, σy et σz, y compris les contraintes de cisaillement τyz, τxz et τxy, sont déterminées directement par le noyau de calcul.
Si un cube avec des longueurs d'arête dx, dy et dz est découpé dans un corps soumis à des contraintes multiaxiales, les contraintes dans chaque face du cube peuvent être décomposées en contraintes normales et de cisaillement. En négligeant la force volumique et les différences de contrainte sur les faces parallèles, l'état de contrainte peut être décrit dans le système de coordonnées local du cube par neuf composantes de contrainte.
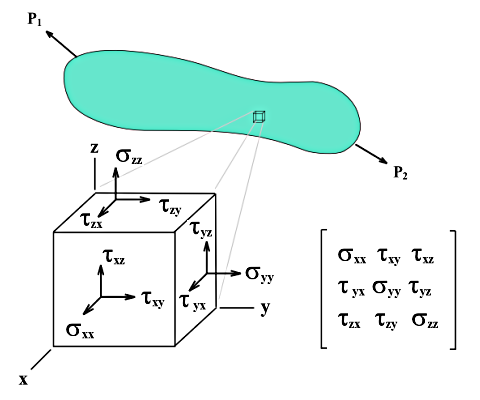
La matrice du tenseur de contrainte est :
Contraintes principales
Les contraintes principales σ1, σ2 et σ3 sont déduites des valeurs propres du tenseur comme suit :
La contrainte de cisaillement maximale τmax est déterminée selon le cercle de Mohr :
Contraintes équivalentes
Les contraintes équivalentes σv selon von Mises peuvent être déterminées par deux formules équivalentes.
Pour la détermination de la contrainte équivalente σv selon Tresca , les différences entre les contraintes principales sont examinées pour en déterminer la valeur maximale.
La contrainte équivalente σv selon Rankine est déterminée à partir des plus grandes valeurs absolues des contraintes principales.
Pour la détermination de la contrainte équivalente σv selon Bach , les différences de contraintes principales sont examinées en tenant compte du coefficient de Poisson ν pour en déterminer la valeur maximale.
Invariants de contraintes
Les invariants de contraintes permettent une description indépendante des coordonnées et donc objective de l'état de contrainte d'un matériau. En tant que grandeurs scalaires, ils restent inchangés lors de rotations arbitraires du système de coordonnées et saisissent les propriétés physiquement pertinentes de ces états indépendamment de la représentation tensorielle choisie. Leur importance particulière réside dans le fait que de nombreux phénomènes mécaniques - en particulier l'écoulement plastique, la rupture et la fissuration - ne dépendent pas de composantes de contrainte individuelles, mais de mesures invariantes. Les invariants de contraintes constituent ainsi la base de nombreux critères d'écoulement et de rupture établis, comme par exemple la théorie de von Mises, de Tresca ou de Drucker-Prager.
La contrainte moyenne p est liée au premier invariant de contrainte I1 et décrit la contrainte hydrostatique. Elle résulte de la moyenne arithmétique des trois contraintes principales et représente la distance du point de contrainte par rapport à l'origine des coordonnées sur la diagonale spatiale.
Elle caractérise l'état de contrainte normale moyen et est principalement responsable des changements de volume. Physiquement, p correspond à un état de compression ou de traction uniforme qui ne provoque pas de changement de forme, mais exclusivement une compression ou une dilatation. Dans de nombreux matériaux, en particulier en mécanique des sols et des roches ainsi que dans les matériaux sensibles à la pression, p influence considérablement le comportement en résistance et en déformation.
La contrainte déviatorique q est liée au second invariant du déviateur de contrainte J2. Elle est calculée comme suit :
|
I1 |
Première Invariante de contrainte |
|
I2 |
Deuxième invariant de contrainte |
|
J2 |
Deuxième invariant de contrainte déviatoire |
Elle décrit la part de l'état de contrainte qui est responsable des changements de forme (distorsions de cisaillement) sans modifier le volume. La part déviatorique pilote en particulier l'écoulement plastique et la rupture dans les matériaux ductiles. Le critère d'écoulement de von Mises repose directement sur J2 ou q et montre que la déformation plastique est principalement contrôlée par les contraintes déviatoriques.
L'angle de Lode θ indique la position du point de contrainte dans le plan déviatorique. Le plan déviatorique est divisé en six secteurs, de sorte que −30° ≤ θ ≤ 30°. L'angle est déterminé comme suit :
|
J2 |
Deuxième invariant de contrainte de déviation : 1/6 [(σ1 – σ2)2 + (σ2 – σ3)2 + (σ3 – σ2)2] |
|
J3 |
Troisième invariant des contraintes déviatoires : 1/27 (2σ1 – σ2 – σ3) (2σ2 – σ3 – σ1) (2σ3 – σ1 – σ2) |
Une sollicitation de cisaillement pur donne θ = 0, tandis que pour θ = 30°, l'état de contrainte σ1 > σ2 = σ3 apparaît, ce qui correspond à un essai de compression triaxial. De θ = −30° résulte l'état de contrainte d'un essai de traction triaxial avec σ1 < σ2 = σ3.
Distorsions
Définissez dans le Navigateur les distorsions qui doivent être affichées sur les surfaces limites des solides. Le tableau répertorie les déformations de ces surfaces selon les spécifications définies dans le Gestionnaire de tableaux de résultats .
Les distorsions de solide sont divisées en catégories suivantes :
- Déformations totales de base
- Déformations totales principales
- Déformations totales équivalentes
- Invariants de déformations
Déformations totales de base
Les déformations totales de base, y compris les distorsions de cisaillement, sont déterminées directement par le noyau de calcul. Pour l'état de distorsion spatial, la définition générale du tenseur est :
Les éléments du tenseur sont définis comme suit :
Déformations totales principales
Les déformations totales principales ε1, ε2 et ε3 sont déterminées à partir des déformations de base.
Déformations totales équivalentes
Les déformations totales équivalentes εv sont déterminées comme suit selon quatre hypothèses de contrainte différentes.
|
R |
Matrice (voir ci-dessous) |
|
R |
Matrice (voir ci-dessous) |
Invariants de déformations
Les invariants de déformations sont des paramètres du tenseur de déformation qui restent indépendants de l'orientation du système de coordonnées. Ils permettent une séparation claire entre le changement de volume et le changement de forme d'un matériau. Cette distinction est centrale pour l'analyse du comportement des matériaux, des critères de résistance et des modèles de plasticité.
L'invariant de déformation volumétrique εv correspond à la part isotrope des déformations totales. Il est déterminé à partir des déformations principales :
Les déformations déviatoriques εq ou également les déformations de cisaillement γs décrivent le changement de forme pur sans changement de volume. Elles se calculent comme suit :