






Puede mostrar gráficamente los resultados de sólidos a través de la categoría del Navegador Sólidos. En la tabla, los resultados numéricos de sólidos se encuentran en la categoría Resultados por sólido.
.png?mw=760&hash=71627fe33fddc42ab64faca4d036ceecb28da92c)
Deformaciones
La imagen Resultados por sólido en la tabla muestra la tabla con las deformaciones de las superficies límite. Las flechas y giros se muestran en los puntos de la cuadrícula de la superficie (ver capítulo Superficies ).
Las deformaciones significan:
| |u| | Valor absoluto de la flecha total |
| uX | Flecha en la dirección del eje X global |
| uY | Flecha en la dirección del eje Y global |
| uZ | Flecha en la dirección del eje Z global |
| φX | Giro alrededor del eje X global |
| φY | Giro alrededor del eje Y global |
| φZ | Giro alrededor del eje Z global |
Tensiones
.png?mw=760&hash=b95435bbf9c07c7f89896b47d2be8a7f2444ee35)
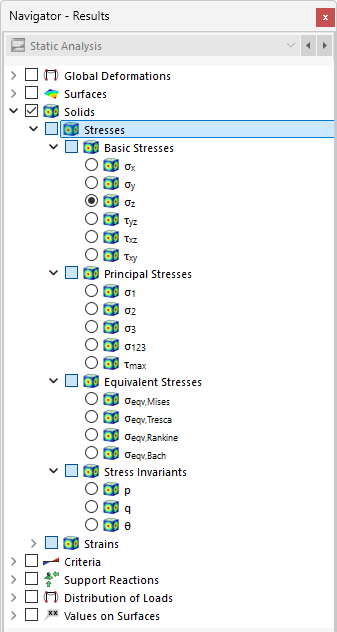
En el Navegador, especifique qué tensiones se mostrarán en las superficies límite de los sólidos. La tabla enumera las tensiones de estas superficies según lo especificado en el Gestor de tablas de resultados .
Las tensiones en sólidos se dividen en las siguientes categorías:
- Tensiones básicas
- Tensiones principales
- Tensiones equivalentes
- Invariantes de tensión
Tensiones básicas
Las tensiones en sólidos no se pueden describir con ecuaciones simples como las tensiones en superficies. Las tensiones básicas σx, σy y σz, incluyendo las tensiones tangenciales τyz, τxz y τxy, se determinan directamente desde el núcleo de cálculo.
Si se corta un cubo con las longitudes de arista dx, dy y dz de un cuerpo con solicitación multiaxial, las tensiones en cada cara del cubo se pueden descomponer en tensiones normales y tangenciales. Despreciando las fuerzas de volumen y también las diferencias de tensión en caras paralelas, el estado de tensión se puede describir mediante nueve componentes de tensión en el sistema de coordenadas local del cubo.
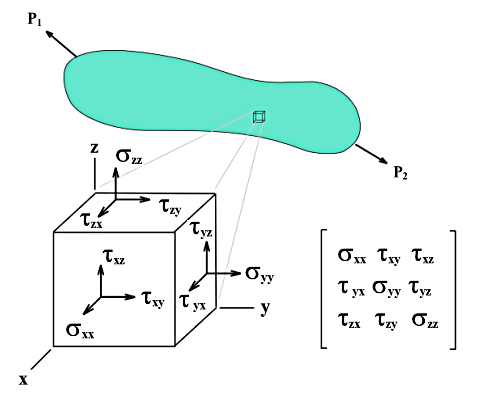
La matriz del tensor de tensiones es:
Tensiones principales
A partir de los valores propios del tensor, se obtienen las tensiones principales σ1, σ2 y σ3 de la siguiente manera:
La tensión tangencial máxima τmax se determina según el círculo de Mohr:
Tensiones equivalentes
Las tensiones equivalentes σv según von Mises se pueden determinar mediante dos fórmulas equivalentes.
Para la determinación de la tensión equivalente σv según Tresca se examinan las diferencias de las tensiones principales para determinar el valor máximo a partir de ellas.
La tensión equivalente σv según Rankine se determina a partir de los valores absolutos más grandes de las tensiones principales.
Para la determinación de la tensión equivalente σv según Bach se examinan las diferencias de tensiones principales considerando el coeficiente de Poisson ν, para determinar el valor máximo a partir de ellas.
Invariantes de tensión
Los invariantes de tensión permiten una descripción independiente de las coordenadas y, por lo tanto, objetiva del estado tensional de un material. Como magnitudes escalares, permanecen inalteradas bajo giros arbitrarios del sistema de coordenadas y registran las propiedades físicamente relevantes de estos estados independientemente de la representación tensorial elegida. Su significado especial radica en que muchos fenómenos mecánicos – en particular la fluencia plástica, el fallo y la rotura – no dependen de componentes de tensión individuales, sino de invariantes escalares. Así, los invariantes de tensión forman la base de numerosos criterios de fluencia y fallo establecidos, como las teorías de von Mises, Tresca o Drucker-Prager.
La tensión media p está vinculada con el primer invariante de tensión I1 y describe la tensión hidrostática. Resulta de la media aritmética de las tres tensiones principales y representa la distancia del punto de tensión al origen de coordenadas en la diagonal espacial.
Caracteriza el estado de tensión normal media y es responsable principal de los cambios de volumen. Físicamente, p corresponde a un estado uniforme de presión o tracción que no causa cambio de forma, sino exclusivamente compresión o dilatación. En muchos materiales, particularmente en la mecánica de suelos y rocas, así como en materiales sensibles a la presión, p influye significativamente en el comportamiento de resistencia y deformación.
La tensión desviadora q está vinculada con el segundo invariante del desviador de tensiones J2. Se determina de la siguiente manera:
|
I1 |
Primer invariante de tensiones |
|
I2 |
Segundo invariante del esfuerzo |
|
J2 |
Segunda invariante del esfuerzo desviador |
Describe la parte del estado tensional que es responsable de los cambios de forma (deformaciones de corte), sin cambiar el volumen. La parte desviadora impulsa particularmente la fluencia plástica y el fallo en materiales dúctiles. El criterio de fluencia de von Mises se basa directamente en J2 o q y destaca que la deformación plástica está controlada principalmente por tensiones desviadoras.
El ángulo de Lode θ indica la posición del punto de tensión en el plano desviador. El plano desviador se divide en seis sectores, de modo que se cumple −30° ≤ θ ≤ 30°. El ángulo se determina de la siguiente manera:
|
J2 |
Segunda invariante de tensión desviadora: 1/6 [(σ1 – σ2)2 + (σ2 – σ3)2 + (σ3 – σ2)2] |
|
J3 |
Invariante de tensión desviadora de tercer orden: 1/27 (2σ1 – σ2 – σ3) (2σ2 – σ3 – σ1) (2σ3 – σ1 – σ2) |
Una solicitación de corte puro resulta para θ = 0, mientras que para θ = 30° se produce el estado de tensión σ1 > σ2 = σ3, que corresponde a un ensayo de compresión triaxial. De θ = −30° resulta el estado de tensión de un ensayo de tracción triaxial con σ1 < σ2 = σ3.
Deformaciones totales
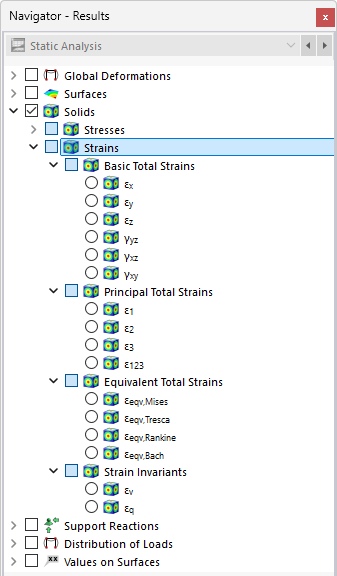
En el Navegador, especifique qué deformaciones se mostrarán en las superficies límite de los sólidos. La tabla enumera las deformaciones de estas superficies según lo especificado en el Gestor de tablas de resultados .
Las deformaciones en sólidos se dividen en las siguientes categorías:
- Deformaciones totales básicas
- Deformaciones totales principales
- Deformaciones totales equivalentes
- Invariantes de deformación
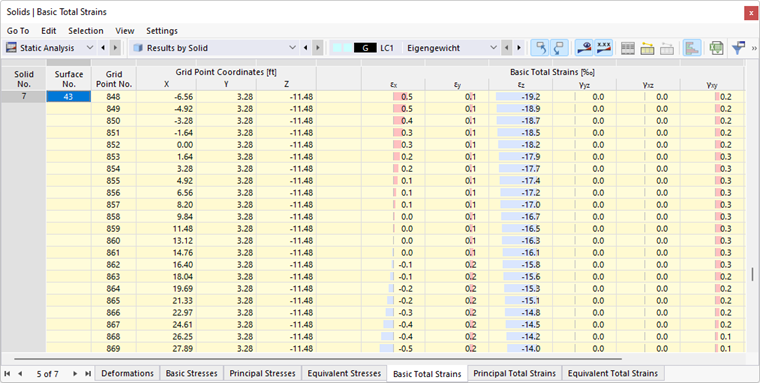
Deformaciones totales básicas
Las deformaciones totales básicas, incluyendo las distorsiones, se determinan directamente desde el núcleo de cálculo. Para el estado de deformación espacial, la definición general del tensor es:
Los elementos del tensor se definen de la siguiente manera:
Deformaciones totales principales
A partir de las deformaciones básicas, se determinan las deformaciones totales principales ε1, ε2 y ε3.
Deformaciones totales equivalentes
Las deformaciones totales equivalentes εv se determinan de la siguiente manera según cuatro hipótesis de tensión diferentes.
|
R |
Matriz (ver a continuación) |
|
R |
Matrix (siehe unten) |
|
R |
Matriz (ver a continuación) |
Invariantes de deformación
Los invariantes de deformación son valores característicos del tensor de deformaciones que permanecen independientes de la orientación del sistema de coordenadas. Permiten una separación clara entre el cambio de volumen y el cambio de forma de un material. La distinción es fundamental para el análisis del comportamiento del material, los criterios de resistencia y los modelos de plasticidad.
El invariante de deformación volumétrica εv corresponde a la parte isótropa de las deformaciones totales. Se determina a partir de las deformaciones principales:
Las deformaciones desviadoras εq o también deformaciones de corte γs describen el cambio de forma puro sin cambio de volumen. Se determinan de la siguiente manera: