






Można wyświetlić wyniki dla brył graficznie w kategorii Navigatora Bryła. Numeryczne wyniki dla brył znajdują się w kategorii tabelarycznej Wyniki według brył.
.png?mw=760&hash=71627fe33fddc42ab64faca4d036ceecb28da92c)
Deformacje
Rysunek Wyniki według brył w tabeli pokazuje tabelę z deformacjami powierzchni granicznych. Przemieszczenia i obroty są wyprowadzane w punktach siatki powierzchni (patrz rozdział Powierzchnie ).
Deformacje oznaczają:
| |u| | Wartość bezwzględna całkowitego przemieszczenia |
| uX | Przemieszczenie w kierunku globalnej osi X |
| uY | Przemieszczenie w kierunku globalnej osi Y |
| uZ | Przemieszczenie w kierunku globalnej osi Z |
| φX | Obrót wokół globalnej osi X |
| φY | Obrót wokół globalnej osi Y |
| φZ | Obrót wokół globalnej osi Z |
Naprężenia
.png?mw=760&hash=b95435bbf9c07c7f89896b47d2be8a7f2444ee35)
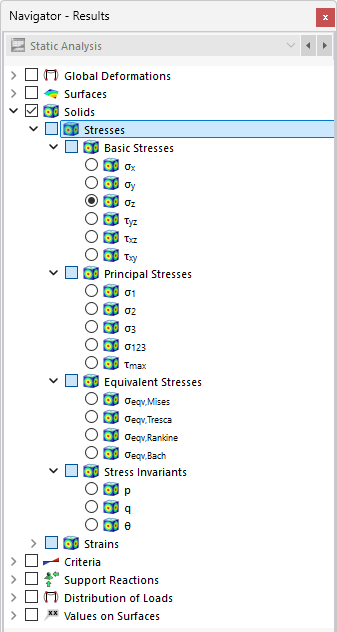
W Navigatorze należy określić, które naprężenia mają być wyświetlane na powierzchniach granicznych brył. Tabela wymienia naprężenia tych powierzchni zgodnie z ustawieniami określonymi w Menedżerze tabel wyników .
Naprężenia w bryle są podzielone na następujące kategorie:
- Naprężenia podstawowe
- Naprężenia główne
- Naprężenia równoważne
- Niezmienniki naprężeń
Naprężenia podstawowe
Naprężenia w bryle nie mogą być opisane prostymi równaniami, jak naprężenia powierzchniowe. Naprężenia podstawowe σx, σy i σz wraz z naprężeniami stycznymi τyz, τxz i τxy są określane bezpośrednio przez rdzeń obliczeniowy.
Jeśli z ciała poddanego wieloosiowemu obciążeniu zostanie wycięty sześcian o długościach krawędzi dx, dy i dz, wówczas naprężenia na każdej ścianie sześcianu można rozłożyć na naprężenia osiowe i styczne. Pomijając siłę objętościową, a także różnice naprężeń na równoległych powierzchniach, stan naprężenia w lokalnym układzie współrzędnych sześcianu można opisać za pomocą dziewięciu składowych naprężeń.
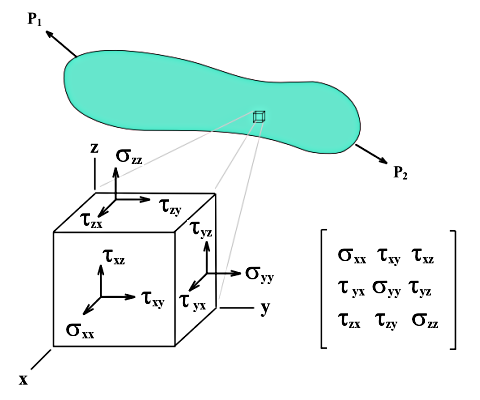
Macierz tensora naprężenia ma postać:
Naprężenia główne
Z wartości własnych tensora wynikają naprężenia główne σ1, σ2 i σ3 w następujący sposób:
Maksymalne naprężenie styczne τmax jest określane na podstawie koła naprężeń Mohra:
Naprężenia równoważne
Naprężenia równoważne σv według von Misesa można określić za pomocą dwóch równoważnych wzorów.
Do określenia naprężenia równoważnego σv według Treski badane są różnice między naprężeniami głównymi, aby na ich podstawie wyznaczyć wartość maksymalną.
Naprężenie równoważne σv według Rankine'a określa się na podstawie największych wartości bezwzględnych naprężeń głównych.
Do określenia naprężenia równoważnego σv według Bacha badane są różnice naprężeń głównych z uwzględnieniem współczynnika Poissona ν, aby na ich podstawie wyznaczyć wartość maksymalną.
Niezmienniki naprężeń
Niezmienniki naprężeń umożliwiają niezależny od współrzędnych, a tym samym obiektywny opis stanu naprężenia materiału. Jako wielkości skalarne pozostają niezmienione przy dowolnych obrotach układu współrzędnych i rejestrują fizycznie istotne właściwości tych stanów niezależnie od wybranej reprezentacji tensora. Ich szczególne znaczenie polega na tym, że wiele zjawisk mechanicznych – w szczególności płynięcie plastyczne, zniszczenie i pękanie – nie zależy od pojedynczych składowych naprężeń, ale od niezmienniczych wartości liczbowych. Tym samym niezmienniki naprężeń stanowią podstawę wielu uznanych kryteriów płynięcia i zniszczenia, takich jak teoria von Misesa, Treski czy Druckera-Pragera.
Naprężenie średnie p jest powiązane z pierwszym niezmiennikiem naprężenia I1 i opisuje naprężenie hydrostatyczne. Wynika ono ze średniej arytmetycznej trzech naprężeń głównych i odwzorowuje odległość punktu naprężenia od początku układu współrzędnych na przekątnej przestrzennej.
Charakteryzuje ono średni stan naprężenia osiowego i jest głównie odpowiedzialne za zmiany objętości. Fizycznie p odpowiada równomiernemu stanowi ściskania lub rozciągania, który nie powoduje zmiany kształtu, a jedynie kompresję lub dylatację. W wielu materiałach, szczególnie w mechanice gruntów i skał oraz w materiałach wrażliwych na ciśnienie, p znacząco wpływa na wytrzymałość i zachowanie odkształceniowe.
Naprężenie dewiatorowe q jest powiązane z drugim niezmiennikiem dewiatora naprężenia J2. Obliczane jest w następujący sposób:
|
I1 |
Pierwsza niezmiennicza naprężeniowa |
|
I2 |
Drugi niezmiennik naprężenia |
|
J2 |
Drugi niezmiennik naprężeń dewiacyjnych |
Opisuje ono część stanu naprężenia, która jest odpowiedzialna za zmiany kształtu (odkształcenia ścinające) bez zmiany objętości. Składowa dewiatorowa napędza w szczególności płynięcie plastyczne i zniszczenie w materiałach ciągliwych. Kryterium płynięcia von Misesa opiera się bezpośrednio na J2 lub q i pokazuje, że deformacja plastyczna jest kontrolowana głównie przez naprężenia dewiatorowe.
Kąt Lodego θ określa położenie punktu naprężenia w płaszczyźnie dewiatorowej. Płaszczyzna dewiatorowa jest podzielona na sześć sektorów, tak że obowiązuje -30° ≤ θ ≤ 30°. Kąt jest określany w następujący sposób:
|
J2 |
Drugi niezmiennik naprężenia dewiatora: 1/6 [(σ1 – σ2)2 + (σ2 – σ3)2 + (σ3 – σ2)2] |
|
J3 |
Trzecia niezmiennicza naprężenia dewiacyjnego: 1/27 (2σ1 – σ2 – σ3) (2σ2 – σ3 – σ1) (2σ3 – σ1 – σ2) |
Czyste obciążenie ścinające występuje dla θ = 0, podczas gdy dla θ = 30° powstaje stan naprężenia σ1 > σ2 = σ3, który odpowiada trójosiowej próbie ściskania. Z θ = -30° wynika stan naprężenia trójosiowej próby rozciągania z σ1 < σ2 = σ3.
Odkształcenia
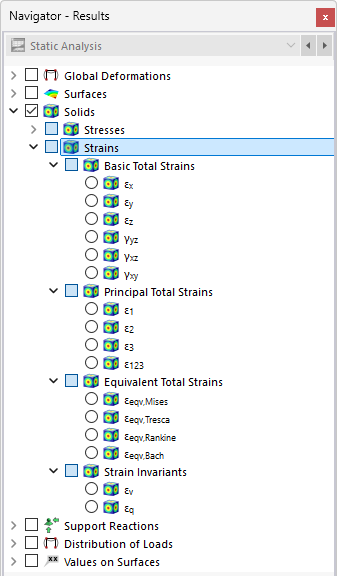
W Navigatorze należy określić, które odkształcenia mają być wyświetlane na powierzchniach granicznych brył. Tabela wymienia odkształcenia tych powierzchni zgodnie z ustawieniami określonymi w Menedżerze tabel wyników .
Odkształcenia w bryle są podzielone na następujące kategorie:
- Podstawowe odkształcenia całkowite
- Główne odkształcenia całkowite
- Równoważne odkształcenia całkowite
- Niezmienniki odkształceń
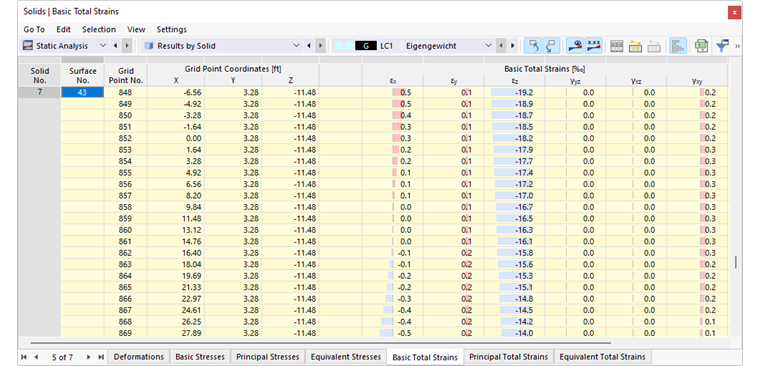
Podstawowe odkształcenia całkowite
Podstawowe odkształcenia całkowite wraz z odkształceniami ścinającymi są określane bezpośrednio przez rdzeń obliczeniowy. Dla przestrzennego stanu odkształcenia ogólna definicja tensora brzmi:
Elementy tensora są zdefiniowane w następujący sposób:
Główne odkształcenia całkowite
Z podstawowych odkształceń wyznaczane są główne odkształcenia całkowite ε1, ε2 i ε3.
Równoważne odkształcenia całkowite
Równoważne odkształcenia całkowite εv są wyznaczane według czterech różnych hipotez naprężeniowych w następujący sposób.
|
R |
Macierz (patrz niżej) |
|
R |
Macierz (patrz niżej) |
Niezmienniki odkształceń
Niezmienniki odkształceń to parametry tensora odkształcenia, które pozostają niezależne od orientacji układu współrzędnych. Umożliwiają one wyraźne rozdzielenie zmiany objętości i zmiany kształtu materiału. To rozróżnienie ma kluczowe znaczenie dla analizy zachowania materiałów, kryteriów wytrzymałości i modeli plastyczności.
Wolumetryczny niezmiennik odkształcenia εv odpowiada izotropowej części odkształceń całkowitych. Wyznaczany jest z odkształceń głównych:
Dewiatorowe odkształcenia εq lub też odkształcenia ścinające γs opisują czystą zmianę kształtu bez zmiany objętości. Obliczane są w następujący sposób: